
Equipment introduction
The Genius mini UAV LiDAR system is a cost-effective surveying and mapping-level LiDAR system independently developed by SureStar. It integrates R-Fans multi-line laser scanner, inertial navigation measurement system (GNSS/IMU), computer control unit, etc., and could be simply operated by one person with high integration, light weight and high data accuracy.
The highly integrated design of Genius mini UAV LiDAR makes the whole system have better performance and stability ,and can acquire 3D spatial information and images of the terrain surface in real time and quickly, and is widely used in the field of agile and efficient 3D measurement area.

Figure 1 Genius mini UAV LiDAR Scanning System
core parameters
● Maximum ranging: 200m@20% reflectivity, 250m@80% reflectivity;
● Typical flying height: 50 ~ 150 m;
● Scan point frequency: 320,000 points per second for 16 lines, 640,000 points per second for 32 lines;
● Relative/absolute plane measurement accuracy: <0.10m/0.15m;
● Scanning field of view: 360°*30°;
● Position accuracy: plane 0.02m, elevation 0.05m;
● Attitude accuracy: pitch/roll: 0.025 degrees, heading: 0.08 degrees;
● Image resolution: 24 million pixels/42 million pixels (optional);
● System weight: 1.056kg (without camera);
● Dot density: 16 lines is better than 100pts/m², 32 lines is better than 200pts/m²;
● Accuracy: the elevation accuracy is better than 10cm, the plane accuracy is better than 10-15cm;
● Data storage: pluggable U disk;
Field work implementation
The survey area is located in a mountainous area in the southwest. In order to control the debris flow in the mountainous area, the relevant unit built the Guyu dam on the top of the mountain. The Guyu dam built a long time ago has been filled with sediment. The Guyu dam needs to be built again to control the debris flow, and the top DEM needs to be obtained to calculate the amount of earthwork to facilitate the design of the retaining dam in the later stage.
Route Planning
The survey area is narrow and long. In order to obtain the entire survey area, the preset route interval is 40m and the height is 80m. The mountain drop is too large for flight safety. Before the official operation, the Elf UAV is used to verify the route. It is planned to use 2 sorties, the full length About 10km.

Figure 2 Scope of the survey area
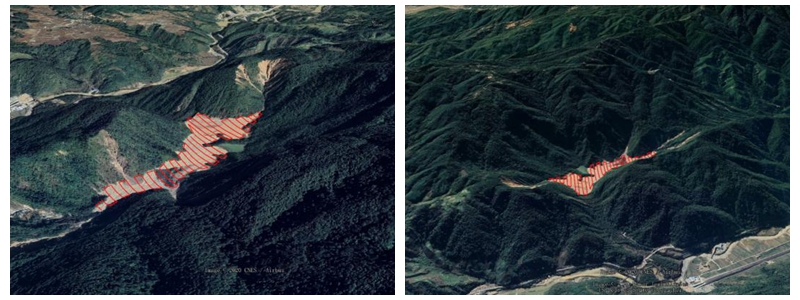
Figure 3 The trend of the surrounding mountains in the survey area

Figure 4 Preset route position
Base station erection
Before the official operation, we need to set up a GPS base station to collect static data, and conduct synchronous observation of the ground GPS and the LiDAR's GPS system. After the flight mission, the base station data and the data observed by the GPS system of the radar are further eliminated by post-difference fusion calculation to obtain a high-precision point cloud.

Figure 5 Base station erection
Checkpoint Collection
While the equipment is mounted on the UAV, start to lay out and collect the phase control points and elevation check points.

Figure 6 Collection of phase control points and check points
data preprocessing
Use POSPac software to perform post-difference calculation to solve the trajectory, use our SS-Lipre point cloud solving software to solve the point cloud and view it in combination with the trajectory data, and denoise the point cloud after checking that the point cloud is correct, remove flying points and Sun noise, etc.

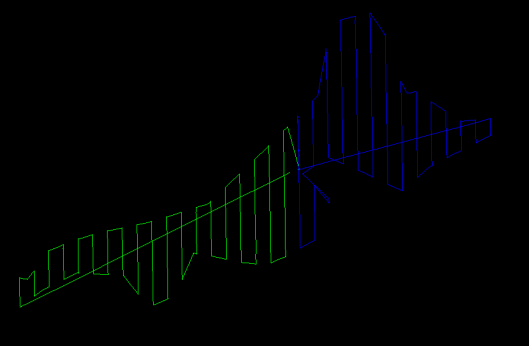
Figure 7 Preset route and actual flight route
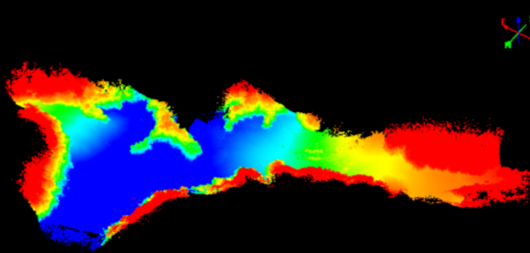
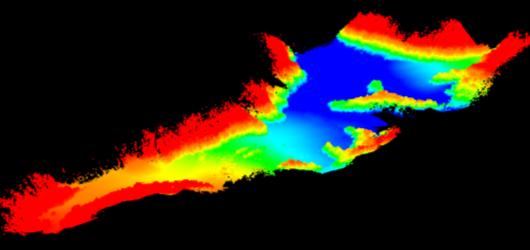
Figure 8 Raw point cloud data
data post-processing
Point clouds were classified using Terrasolid software editing macros.
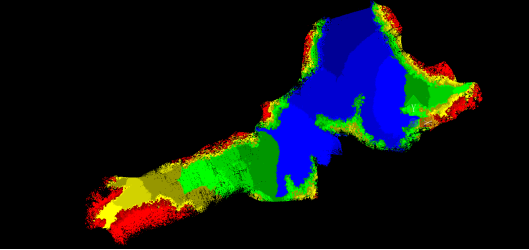
Figure 9 Original point cloud

Figure 10 Classified point cloud
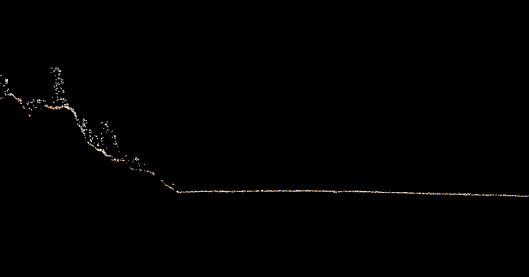
Figure 11 Screenshot of the classified point cloud
Orthophoto and color point cloud processing
The collected image is matched with the photo to make an image POS according to the exposure information, and the orthophoto is produced by combining the phase control points with the image processing software.
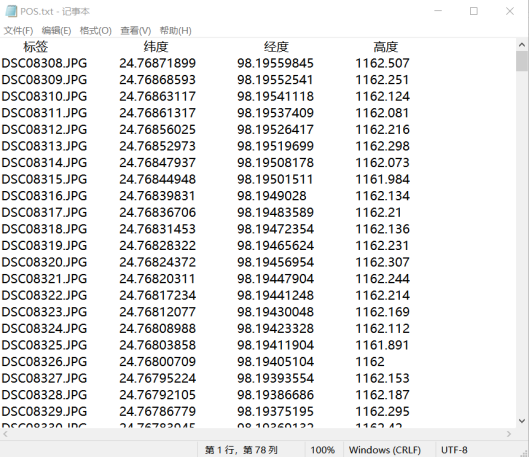
Figure 12 Image POS data
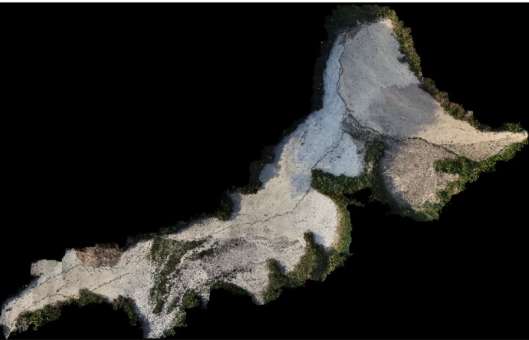
Figure 13 Digital Orthophoto DOM
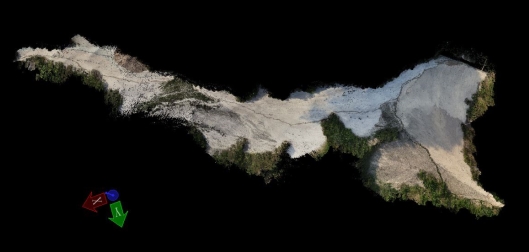
Figure 14 Colored point cloud
Line Drawing (DLG) Processing
According to the collected point cloud information, the ground points are obtained after classification, and the DEM is made. With the support of third-party software such as Coal Aviation 2D and 3D software, Terrasolid, and Southern Cass, DEM can process the line drawing (DLG) we want.
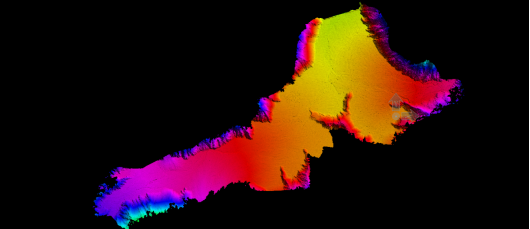
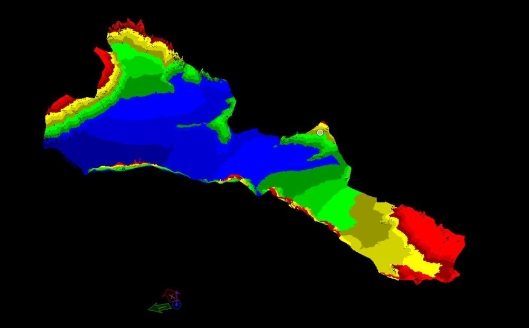
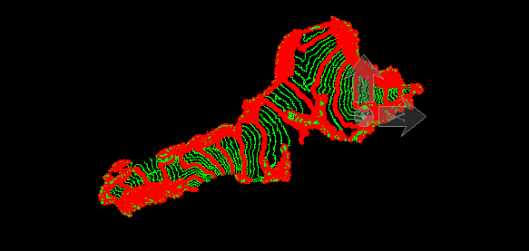
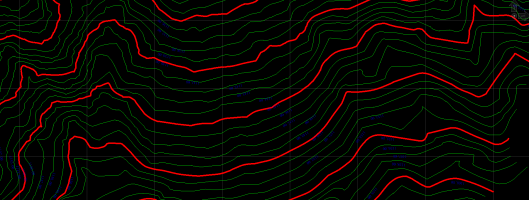
Figure 16 Digital Line Drawing
Accuracy verification
The software compares the point cloud data next to the check point, and outputs the check point accuracy comparison table.
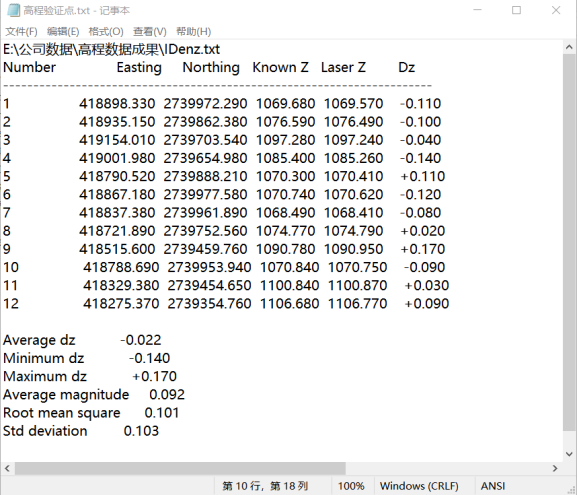
Figure (18) Verification of Elevation Accuracy
After inspection, the final result has a mid-elevation error of 10.1 cm, which meets the customer's requirement for mid-elevation error.
Project summary
By using the Genius UAV LiDAR system for this 1:1000 terrain mapping, the advantages of the Genius airborne lidar system compared with other traditional methods are as follows:
(1) Convenient and flexible operation, suitable for surveying and mapping of small-scale irregular surveying areas such as plains and mountainous areas;
(2) It is light in weight and can be equipped with DJI M210/300 small UAVs for long-distance operations, and the individual operation is strong, so that complex field activities can be solved in an unmanned way;
(3). The extremely high point density per square meter ensures the quality of the data;
(4). High elevation accuracy, can meet the effect of elevation accuracy better than 10cm without control, suitable for high-precision engineering survey;
(5). Its dual echoes mode can obtain high-precision terrain coordinate data through vegetation;
(6). The domestic self-developed lidar equipment has strong performance, timely and effective after-sales team guarantee, so that customers can afford it and use it well.