R Angle mobile LiDAR
-

R Angle mobile LiDARRead More
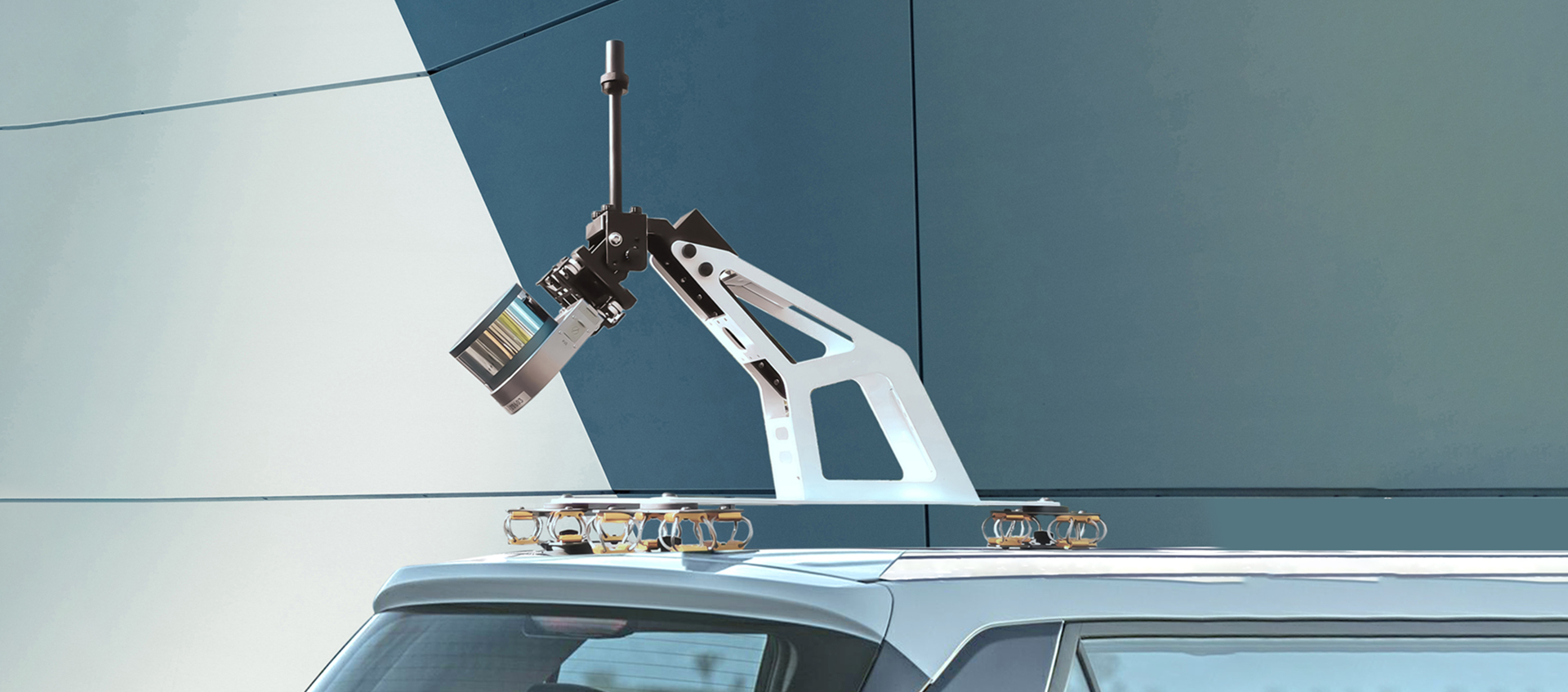
R-Angle mobilie LiDAR can be installed onto vehicles, boats and other moving platorms. R-Angle is featured with long range, high precision, small size and light weight. R-Angle include 3 models with maximum range, i.e. RA-0500, RA-1000, RA-1500. R-Angle provides integration interfaces for various IMUs and Camera.
