
«Восприятие, принятие решений и исполнение» среди трех основных элементов автономного вождения «восприятие», несомненно, является самым важным.
Если автономное транспортное средство хочет заменить водителя, чтобы взять на себя управление транспортным средством, оно должно иметь более сильное восприятие, чем люди. Если точное восприятие не может быть достигнуто, принятие решений и их исполнение невозможны. Реализация безопасного, надежного и точного восприятия не может быть достигнута с помощью одного продукта или технологии.
На данном этапе модели автопилота L3 производятся серийно и поступают в продажу, что действительно открывает двери для автопилота высокого класса. Будь то автомобильные компании, производители датчиков или технологические гиганты, все они считают, что только применяя слияние датчиков, они могут удовлетворить потребности в восприятии автономных транспортных средств высокого класса.
Сегодня Xiaohui приглашает всех посмотреть, какое решение для слияния датчиков является лучшим выбором для автономного вождения!
Для достижения точного восприятия нельзя полагаться на "единоборство"
Нет необходимости повторять важность датчиков для беспилотных автомобилей. Среди трех основных элементов автономного вождения восприятие является основой для принятия и исполнения решений, а также наиболее важной частью процесса автономного вождения в полном смысле реализации.
Однако реализация безопасного, надежного и точного восприятия не может быть достигнута с помощью одного датчика определенного типа. Поскольку так называемое «иногда фут может оказаться коротким, а дюйм может оказаться длинным», нынешние основные датчики не являются «шестиугольными воинами», которые полностью способны выполнять задачи автономного обнаружения транспортных средств в одиночку.
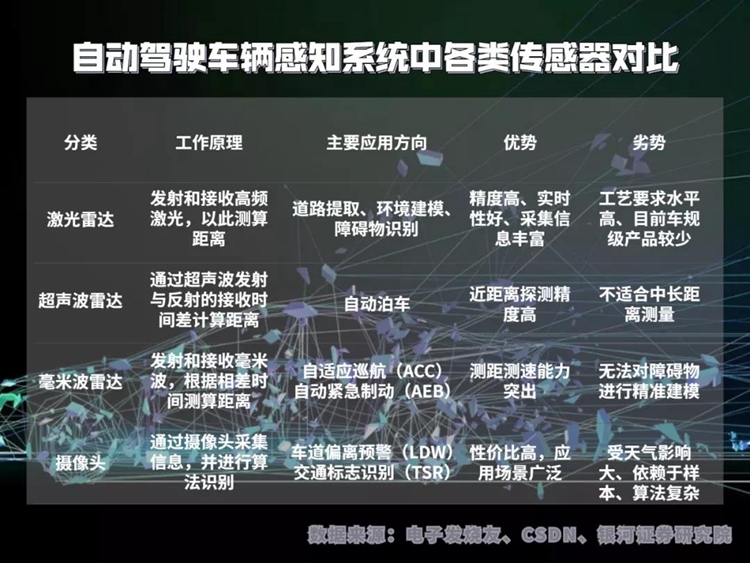
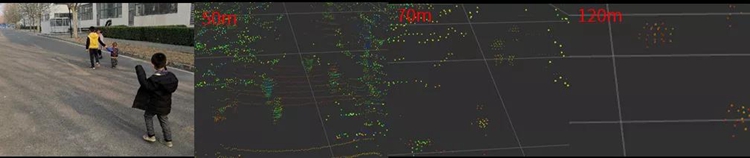
Лидаримеет выдающиеся преимущества, такие как высокая точность, измерение на большом расстоянии, хорошая производительность в реальном времени и богатый сбор информации. В последние годы компания также добилась больших успехов в области жгута проводов, миниатюризации, соблюдении правил для транспортных средств и контроле затрат. Однако при обнаружении удаленных объектов информация о местоположении, полученная лидаром, часто бывает скудной. Если полагаться на разницу в отражательной способности высокочастотного лазера, чтобы отличить препятствия от материалов, этого немного недостаточно в сложной реальной среде вождения.
Технология радара миллиметрового диапазона является зрелой, но поскольку на миллиметровую волну значительно влияет затухание и поглощение атмосферой, радар миллиметрового диапазона не может выполнять точное и непрерывное моделирование препятствий в динамическом процессе вождения транспортного средства.
Хотя технология камеры также очень зрелая и имеет высокое разрешение, она имеет ограниченное поле зрения и может фокусироваться только на ограниченном поле зрения. Кроме того, данные или изображения, которые он получает, являются двумерными, без информации о значении глубины и не могут точно отражать относительное расстояние между различными объектами в пределах диапазона обнаружения.

Камера может фокусироваться только на ограниченном поле зрения
Точность обнаружения ультразвуковых радаров чрезвычайно высока, расстояние обнаружения очень мало, а передача и прием ультразвуковых волн более чувствительны к погодным условиям, чем миллиметровые волны. В высокоскоростной среде ошибка ультразвуковой дальности будет увеличиваться из-за низкой скорости среды обнаружения.
Хотя есть и "фундаменталисты" вроде Теслы, которые всегда придерживаются линии чисто визуального восприятия. Но в целом в индустрии автономного вождения наиболее популярны решения, объединяющие различные типы датчиков.
«Стандартный ответ» для слияния датчиков
Однако также довольно сложно реализовать приложения для слияния для разных типов датчиков. Некоторые датчики по своей природе трудно совмещать, а некоторые слияния между датчиками нецелесообразны.
Например, между лидаром и ультразвуковыми датчиками и радарами миллиметрового диапазона, хотя они обнаруживают разные среды, их принципы работы схожи, и лидар намного превосходит два других датчика с точки зрения эффективности обнаружения.
Возьмем, к примеру, C-Fans-256, первый в мире твердотельный лидар с 256 линиями автомобильной колеи, официально выпущенныйСуестарне так давно: продукты серии C-Fans - это первые отечественные фронтальные лидары с полной конструкцией вагонной колеи как серия. Последний продукт в Китае, C-Fans-256, имеет разрешение 0,1°x0,1°. Благодаря всенаправленному сканирующему полю зрения он может легко осуществлять крупномасштабный и дальний мониторинг территории, а также автономные транспортные средства, такие как поворот налево без защиты. Обеспечьте широкое поле зрения в сложных сценах, чтобы позаботиться о транспортных средствах. или пешеходы справа.
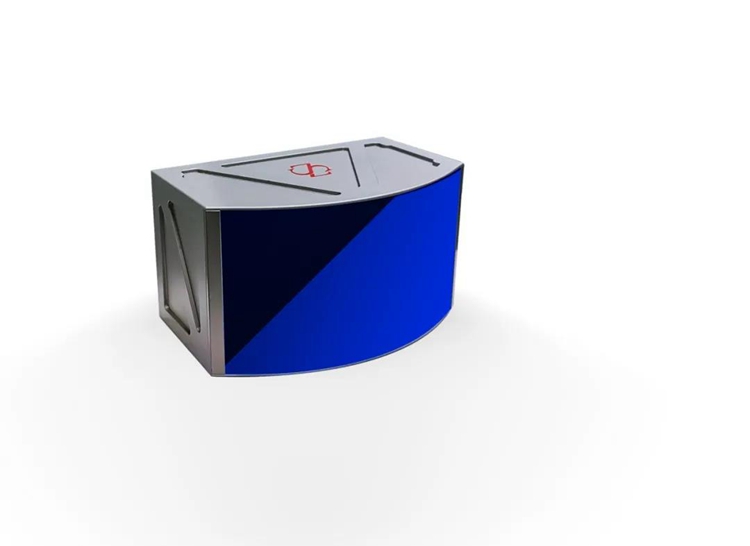
Первый в мире 256-лучавтомобильный твердотельный лидар C-Fans-256
Сверхвысокая частота кадров уровня спортивной камеры дает этому лидару мощное поле зрения и возможность фиксировать аномальные события, будь то обнаружение препятствий или зондов-призраков, высокоскоростное слияние с основной дорогой, высокоскоростное внезапное торможение и автоматическая езда в сложных сценах. Он имеет хорошую производительность, которая больше подходит для высокоскоростных, динамичных и сложных реальных условий вождения. Благодаря 8-битному разрешению в оттенках серого C-Fans-256 реализует всепогодное и четкое распознавание линий полосы движения.
В настоящее время усовершенствованный лидар получил широкое признание в качестве основного датчика, необходимого для автономного вождения, благодаря его всеобъемлющей и выдающейся производительности. Если все три объединить вместе, то результат, который мы получим, вероятно, будет «1 + 1 + 1 = 1», что не может отражать преимущества ультразвуковых датчиков и радаров миллиметрового диапазона.
Хотя радар миллиметрового диапазона может эффективно компенсировать проблему, заключающуюся в том, что исходные данные, собранные камерой, не содержат информации о глубине, разрешение цели радара миллиметрового диапазона очень низкое, и невозможно даже определить размер и контур цели. в некоторых сценариях. См. «вопрос». Это делает невозможным достижение низкоуровневой и глубокой интеграции между ними, и чаще их можно использовать только в форме «упрощенной интеграции» для решения некоторых задач измерения скорости цели или отслеживания траектории.
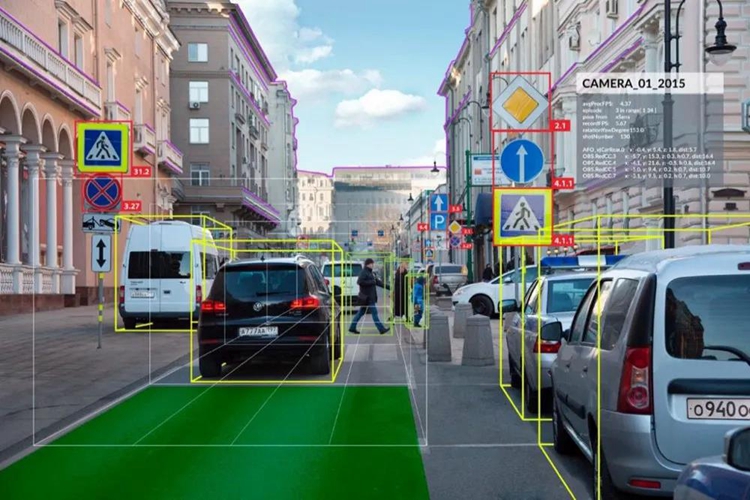
Будь то подавляющее большинство моделей автопилота L3, представленных в настоящее время на рынке, или выпущенные решения для автопилота более высокого уровня, они выбрали решение для восприятия, основанное на «лидар + камера" и с помощью других датчиков окружающей среды.
Текущая основная схема слияния «лидар + камера».
Почему среди всевозможных сенсоров, будь то автомобильные компании или технологические гиганты, все акцентируют свое внимание на лидарах и камерах?
В общем, это потому, что они могут быть хорошо интегрированы для достижения конечной цели «обучения сильным сторонам друг друга», так что система автономного вождения может фактически выдержать «длинное» и компенсировать все «короткое». Его можно назвать «стандартным ответом» для слияния датчиков в автономных системах восприятия вождения.
Лидар + камера = будущее
Лидар провозглашен в отрасли «глазом автономного вождения». Только с точки зрения характеристик восприятия это лучший датчик из всех типов, необходимых для автономной системы вождения. Лидар излучает и принимает высокочастотные лазеры для получения информации о местоположении, что позволяет достичь чрезвычайно высокой точности дальности и устойчивости к помехам окружающей среды. По сравнению с другими 3D-датчиками диапазон лидара имеет очевидные преимущества.
Лидар обладает отличными сенсорными возможностями.
Твердотельный лидар сверхвысокого разрешения уровня изображения C-Fans-256, разработанныйСуестарМожет точно фиксировать положение и точечную информацию о транспортных средствах и пешеходах на расстоянии 200 м, а также может точно идентифицировать кубические препятствия с длиной стороны 20 см. Эффективное расстояние также составляет почти 60 м.
C-Fans-256 также обеспечивает потребляемую мощность менее 16 Вт и имеет высокое соответствие транспортным средствам в общей сложности 31 тесту в 9 категориях ISO16750 и может стабильно и нормально работать в суровых условиях, таких как сильный холод и жара, высокие температура и влажность, прочные неровности и т. д. . Кроме того, еще один продукт из той же серии, C-Fans-32, в настоящее время является единственным лидарным продуктом, прошедшим сертификацию «искробезопасность».
Как датчик изображения, который существует уже давно, камера имеет относительно низкую стоимость. Не только связанная отраслевая цепочка, но и камера очень зрелая в технологиях. Кроме того, камера имеет высокое разрешение, и посредством алгоритмической обработки можно получить плотную оценку информации о глубине на большом расстоянии.
Применение камеры в беспилотном автомобиле
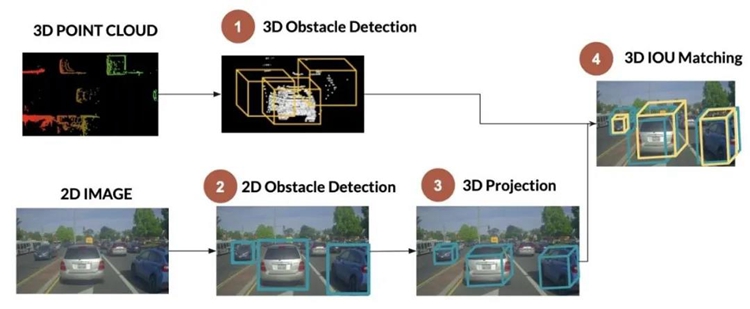
При условии завершения калибровки и синхронизации лидара и камеры облако точек лидара может быть откалибровано и спроецировано на плоскость изображения камеры для формирования относительно разреженной, но очень точной карты глубины. В сочетании с результатами обработки алгоритма изображения автономная система восприятия вождения позволяет получать точные и плотные данные о глубине практически без тупиков, чтобы реализовать точное понимание относительного расстояния, профиля положения и скорости движения препятствий. в большой дальности обнаружения.
Для лидара камера может не только сглаживать влияние слегка разреженного локального облака точек при обнаружении целей на большом расстоянии, но также улучшать разрешение различных препятствий с тем же материалом и схожими положениями с помощью реального изображения камеры с высоким разрешением. изображение.
Существование лидара значительно решает проблему низкой точности оценки глубины камеры как пассивного датчика обнаружения и значительно повышает стабильность и надежность всей сенсорной системы. «Химическая реакция», вызванная их комбинацией, позволяет системе восприятия автономного вождения развиваться и достигать действительно точного восприятия.

Объединение лидара и камеры (источник данных: набор данных KITTI)
Хотя есть много вопросов, ожидающих, пока люди изучат прорывы на пути применения лидара и слияния камер, например, «как лучше спроецировать облако точек на изображение», «как обеспечить правильное и эффективное сопоставление». и «точность отслеживания признаков», «Как улучшить» и так далее.
Однако по мере того, как беспилотные автомобили L3 появляются на рынке один за другим, сегодня, когда лидарная дорожка продолжает загораться, не только автомобильные компании, но и производители лидаров-ветеранов, такие какСуестар, которые более десяти лет активно участвуют в исследованиях и разработках продуктов, также начали углубленное изучение интеграции лидара и камер. Я считаю, что «идеальная интеграция» LiDAR и камеры не займет много времени. стать реальностью. Давайте приблизимся к новому будущему, в котором автономное вождение станет зрелым и популярным. (www.isurestar.net)