
"Percepção, tomada de decisão e execução" entre os três principais elementos da direção autônoma, a "percepção" é sem dúvida o mais importante.
Se um veículo autônomo deseja substituir o motorista para assumir a operação do veículo, ele deve ter uma percepção mais forte do que os seres humanos. Se a percepção precisa não pode ser alcançada, a tomada de decisões e a execução são impossíveis. A realização de uma percepção segura, confiável e precisa não pode ser realizada apenas por um único produto ou tecnologia.
Nesta fase, os modelos de piloto automático L3 estão sendo produzidos em massa e colocados à venda, o que realmente abre as portas para o piloto automático de ponta. Quer se trate de montadoras, fabricantes de sensores ou gigantes da tecnologia, todos acreditam que somente aplicando a fusão de sensores podem atender às necessidades de percepção de veículos autônomos de ponta.
Hoje, Xiaohui levará todos para ver qual solução de fusão de sensores é a melhor escolha para direção autônoma!
Para obter uma percepção precisa, você não pode confiar em "luta única"
A importância dos sensores para carros autônomos não precisa ser repetida. Entre os três principais elementos da direção autônoma, a percepção é a base para a tomada de decisão e execução, e é também a peça mais crítica do quebra-cabeça no processo de direção autônoma no sentido pleno de realização.
No entanto, a realização de uma percepção segura, confiável e precisa não pode ser alcançada apenas por um determinado tipo de sensor. Como o chamado "Às vezes um pé pode ser curto, enquanto uma polegada pode ser longa", os sensores convencionais atuais não são os "guerreiros hexagonais" que são totalmente capazes de realizar tarefas autônomas de detecção de veículos sozinhos.
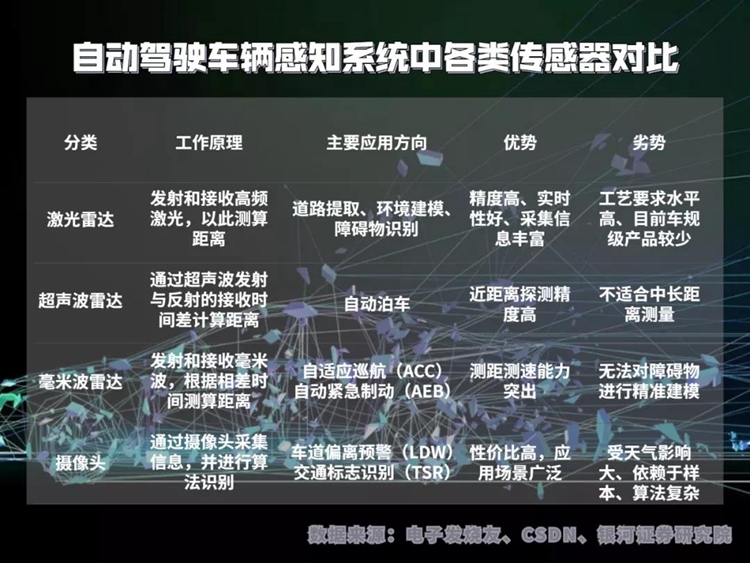
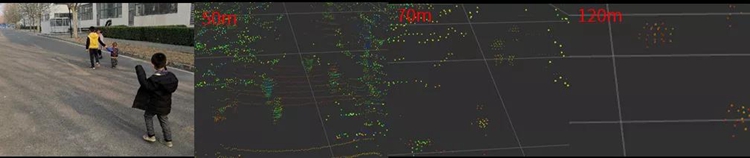
Lidartem vantagens excepcionais, como alta precisão, medição de longo alcance, bom desempenho em tempo real e rica coleção de informações. Nos últimos anos, também fez grandes progressos em chicotes elétricos, miniaturização, conformidade com os regulamentos de veículos e controle de custos. No entanto, ao detectar objetos distantes, as informações de posição obtidas pelo lidar geralmente são esparsas. Baseando-se na diferença de refletividade do laser de alta frequência para distinguir obstáculos de materiais, é um pouco insuficiente no complexo ambiente de direção real.
A tecnologia de radar de onda milimétrica está madura, mas como a onda milimétrica é significativamente afetada pela atenuação e absorção da atmosfera, o radar de onda milimétrica é incapaz de realizar modelagem precisa e contínua de obstáculos no processo dinâmico de direção do veículo.
Embora a tecnologia da câmera também seja muito madura e tenha alta resolução, ela possui um campo de visão limitado e pode focar apenas em um campo de visão limitado. Além disso, os dados ou imagens obtidos são bidimensionais, sem informações de valor de profundidade e não podem refletir com precisão a distância relativa de diferentes objetos dentro do alcance de detecção.

A câmera só pode focar em um campo de visão limitado
A precisão da detecção do radar ultrassônico é extremamente alta, a distância de detecção é muito curta e a transmissão e recepção de ondas ultrassônicas são mais suscetíveis às condições climáticas do que ondas milimétricas. Em um ambiente de alta velocidade, o erro de alcance ultrassônico aumentará devido à baixa velocidade do meio de detecção.
Embora também existam "fundamentalistas" como Tesla, que sempre aderem à linha da pura percepção visual. Mas, no geral, as soluções que integram diferentes tipos de sensores são as mais populares na indústria de direção autônoma.
A "resposta padrão" para fusão de sensores
No entanto, também é bastante difícil implementar aplicações de fusão para diferentes tipos de sensores. Alguns sensores são inerentemente difíceis de fundir e algumas fusões entre sensores não valem a pena.
Por exemplo, entre sensores lidar e ultrassônicos e radares de ondas milimétricas, embora detectem meios diferentes, seus princípios de funcionamento são semelhantes, e o lidar é muito superior aos outros dois sensores em termos de desempenho de detecção.
Pegue o C-Fans-256, o primeiro lidar de estado sólido de calibre de carro de 256 linhas do mundo lançado oficialmente pelacertezanão faz muito tempo: os produtos da série C-Fans são os primeiros lidars domésticos montados na frente com design de medidor de carro completo como uma série. O produto mais recente na China, C-Fans-256 tem uma resolução de 0,1°x0,1°. Com seu campo de visão de varredura omnidirecional, ele pode facilmente realizar monitoramento de área em larga escala e longa distância e veículos autônomos, como virar à esquerda sem proteção Fornece um amplo campo de visão em cenas difíceis, para cuidar de veículos ou pedestres à direita.
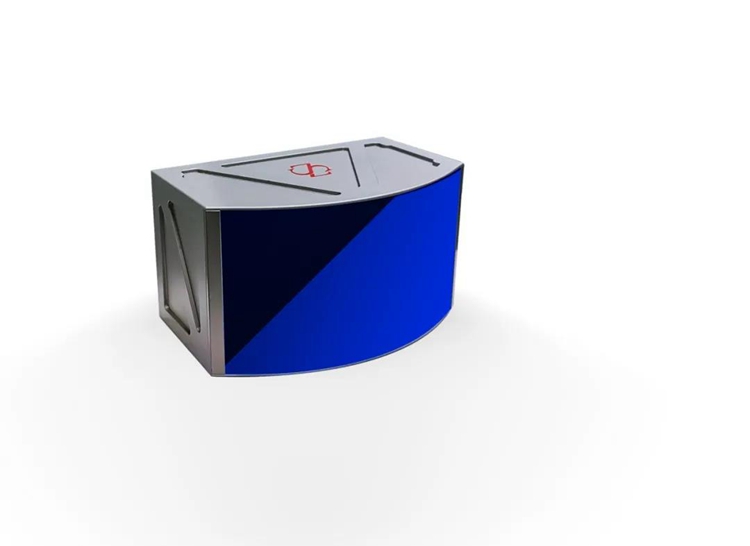
O primeiro 256-feixelidar de estado sólido automotivo C-Fans-256
A taxa de quadros ultra-alta do nível da câmera esportiva dá a este lidar um poderoso campo de visão e a capacidade de capturar eventos anormais, seja detectando obstáculos ou sondas fantasmas, fusão de alta velocidade na estrada principal, súbita de alta velocidade travagem e cenas difíceis de condução automática. Tem um bom desempenho por baixo, o que é mais adequado para ambientes de direção reais complexos, dinâmicos e de alta velocidade. Com resolução em escala de cinza de 8 bits, o C-Fans-256 realiza reconhecimento de linha de pista clara e em qualquer clima.
Atualmente, o lidar evoluído tem sido amplamente reconhecido como o principal sensor essencial na direção autônoma com seu desempenho abrangente e excepcional. Se os três forem fundidos, o resultado que obtemos provavelmente será "1+1+1=1", o que não pode refletir as vantagens dos sensores ultrassônicos e dos radares de ondas milimétricas.
Embora o radar de ondas milimétricas possa efetivamente compensar o problema de que os dados originais coletados pela câmera não possuem informações de valor de profundidade, a resolução do alvo do radar de ondas milimétricas é muito baixa e o tamanho e o contorno do alvo não podem ser determinados. em alguns cenários. Consulte a questão. Isso impossibilita a integração profunda e de baixo nível entre os dois e, mais frequentemente, eles só podem ser usados na forma de "integração simplificada" para resolver alguns problemas de medição de velocidade ou rastreamento de trajetória.
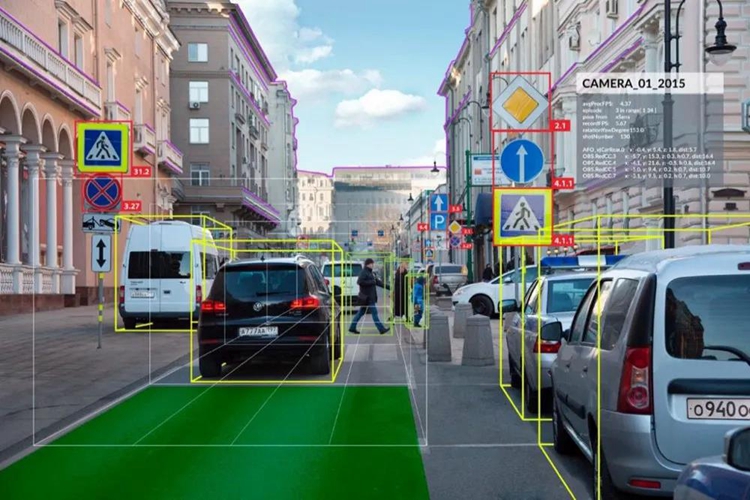
Seja a grande maioria dos modelos de piloto automático L3 atualmente no mercado ou as soluções de piloto automático de nível superior que foram lançadas, eles escolheram uma solução de percepção baseada em "lidar + câmera" e assistido por outros sensores ambientais.
Um esquema de fusão atual "lidar + câmera"
Por que entre todos os tipos de sensores, sejam montadoras ou gigantes da tecnologia, todos eles concentram sua atenção em lidar e câmeras?
Em geral, é porque os dois podem ser bem integrados para atingir o objetivo final de "aprender com os pontos fortes um do outro", para que o sistema de direção autônoma possa realmente levar o "longo" e compensar todos os "curtos". Pode ser chamada de "resposta padrão" para fusão de sensores em sistemas autônomos de percepção de direção.
Lidar + Câmera = Futuro
Lidar é aclamado como o “olho da direção autônoma” pela indústria. Somente em termos de desempenho de percepção, é o melhor sensor de todos os tipos exigidos por um sistema de direção autônoma. O lidar emite e recebe lasers de alta frequência para obter informações de posição, o que permite alcançar precisão de alcance extremamente alta e resistência a interferências ambientais. Comparado com outros sensores 3D, o alcance do lidar tem vantagens óbvias.
Lidar tem excelentes capacidades de detecção
O lidar C-Fans-256 de estado sólido de resolução ultra-alta em nível de imagem desenvolvido porcertezapode capturar com precisão as informações de posição e ponto de veículos e pedestres a uma distância de 200m e pode identificar com precisão obstáculos cúbicos com um comprimento lateral de 20cm. A distância efetiva também é de quase 60m.
O C-Fans-256 também atinge um consumo de energia inferior a 16W e possui alta conformidade com o veículo, com um total de 31 testes em 9 categorias da ISO16750, e pode funcionar de forma estável e normal em ambientes hostis, como frio e calor intensos, alta temperatura e umidade, solavancos, etc. Além disso, outro produto da mesma série, o C-Fans-32, é atualmente o único produto lidar que passou na certificação "intrinsecamente seguro".
Por ser um sensor de imagem que já existe há muito tempo, a câmera tem um custo relativamente baixo. Não apenas a cadeia da indústria relacionada, mas a câmera também é muito madura em tecnologia. Além disso, a câmera possui alta resolução e a estimativa de informações de profundidade densa a longa distância pode ser obtida por meio do processamento de algoritmos.
Aplicação de câmera em carro sem motorista
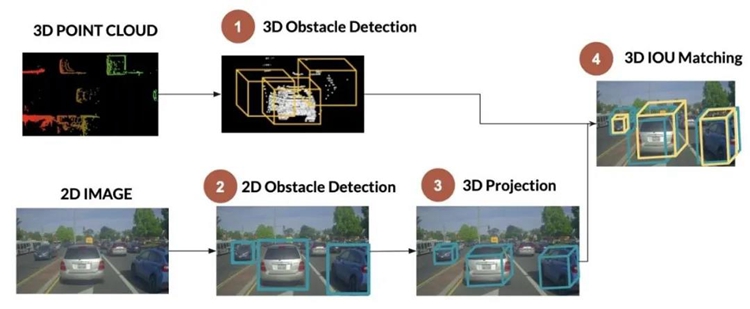
Sob a premissa de completar a calibração e sincronização do lidar e da câmera, a nuvem de pontos do lidar pode ser calibrada e projetada no plano de imagem da câmera para formar um mapa de profundidade relativamente esparso, mas muito preciso. Combinado com os resultados do processamento do algoritmo de imagem, o sistema autônomo de percepção de direção é possível obter dados de informações de profundidade precisos e densos quase sem becos sem saída, de modo a realizar a compreensão precisa da distância relativa, perfil de posição e velocidade de movimento dos obstáculos em uma grande faixa de detecção.
Para lidar, a câmera pode não apenas suavizar a influência da nuvem de pontos local ligeiramente esparsa ao detectar alvos de longa distância, mas também aprimorar a resolução de diferentes obstáculos com o mesmo material e posições semelhantes por meio da cena real de alta resolução da câmera imagem.
A existência do lidar melhora muito o problema da baixa precisão da estimativa de profundidade da câmera como um sensor de detecção passiva e melhora significativamente a estabilidade e a robustez de todo o sistema de detecção. A "reação química" produzida pela combinação dos dois permite que o desempenho do sistema autônomo de percepção de direção evolua e alcance uma percepção precisa real.

Lidar + fusão de câmera (fonte de dados: conjunto de dados KITTI)
Embora existam muitos problemas esperando que as pessoas explorem avanços no caminho da aplicação de lidar e fusão de câmera, como "como projetar melhor a nuvem de pontos na imagem", "como garantir que a correspondência seja verdadeira e eficaz" , e "a precisão do rastreamento de recursos" Como melhorar ainda mais" e assim por diante.
No entanto, como os carros autônomos L3 estão no mercado um após o outro, hoje, como a pista lidar continua pegando fogo, não apenas as montadoras, mas fabricantes veteranos de lidar comocerteza, que estão profundamente envolvidos em pesquisa e desenvolvimento de produtos há mais de dez anos, também começaram a explorar profundamente a integração de lidar e câmeras. Acredito que não demorará muito para a "integração perfeita" de LiDAR e câmera para se tornar uma realidade. Vamos nos aproximar de um novo futuro onde a direção autônoma é madura e popular. (www.isurestar.net)