
The era of high-end autonomous driving has really come. Unknowingly, L3 level autonomous vehicles on the market have completed the leap of "from nothing to more".
From L2 to L3, the autonomous driving system finally took over the important task of monitoring the surroundings of the vehicle from the driver. The importance of perception ability to autonomous vehicles has also been raised to an unprecedented height.
In the process of exploring stronger perception capabilities, new car manufacturers and traditional car companies have gradually reached a consensus on which sensors to choose: Only by fusion and application of sensors can the perception needs of high-end autonomous vehicles be better met.
Perceive the "main lineup" of Self-driving
Recently, the BMW Group announced that it will provide consumers with L3 autonomous driving capability upgrade services in the form of an "optional upgrade package" on its 7-series sedan. Even after the new forces of car manufacturing have released L3 autonomous vehicles, traditional car companies have also begun to make great strides in the evolution of autonomous driving.
Looking at the L3 self-driving models that have been sold or announced on the market, it is not difficult to find that the current car companies are highly consistent in the sensor configuration of the self-driving vehicle perception system. Cameras, lidars, millimeter-wave radars, and ultrasonic radars have become "the only four best choices" recognized by car companies.
So, for autonomous vehicles, what are the functions of these four types of sensors, and what are their advantages and disadvantages? Let Xiaohui explain it for you one by one.
Camera
Among the four types of mainstream sensors, the camera has the most mature technology, a relatively wide range of applications, and a relatively low cost. At the same time, it has significant advantages in terms of resolution, one of the core parameters in perceptual performance. At present, the resolution of the camera mounted on the self-driving car that adopts the visual perception solution can reach 1280x960 pixels generally. It is equivalent to monitoring and perceiving the surrounding environment of the vehicle body in the form of "high-definition live broadcast".
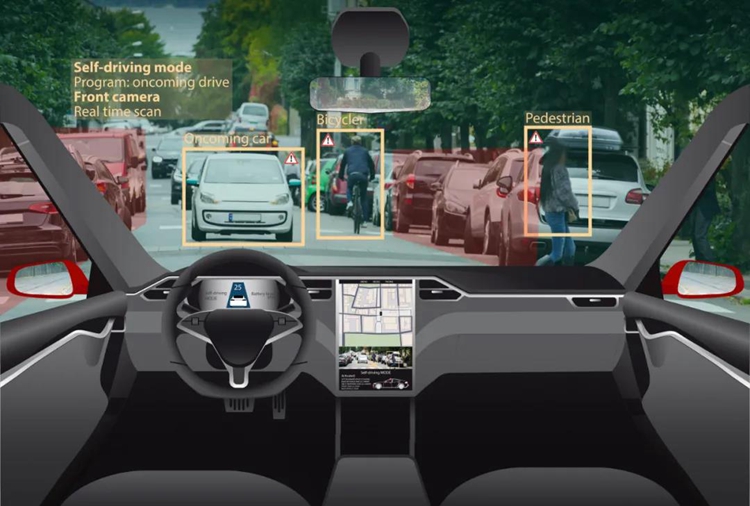
With the support of the algorithm, the camera can also realize the classification of objects in the survey area during the sensing process
In spite of so many advantages, the camera is unable to "take the lead" in the autonomous driving perception system. This is not only due to its limited field of view, it can only focus on a limited field of view. It is also because the data or image it obtains is two-dimensional, without depth value information, and cannot accurately reflect the relative distance of different objects within the sensing range. The camera requires complex algorithm support and other types of sensor fusion applications.
LiDAR
Lidar has outstanding advantages such as high accuracy, long ranging, good real-time performance, and rich collection of information. Take the image-level ultra-high-resolution solid-state lidar C-Fans-256 developed by Surestar as an example, this LiDAR can accurately capture and perceive people, cars, and objects at a distance of 200m, and has low-latency dynamic capture and fine grayscale recognition capabilities.
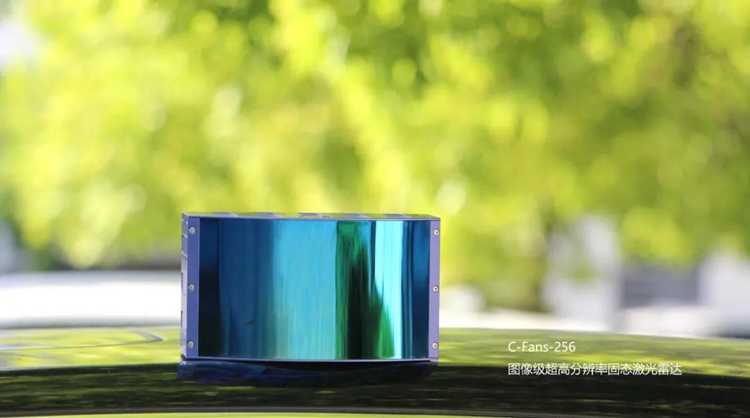
C-Fans-256
From a technical point of view, lidar can even be called the "perfect autonomous driving sensor." However, a large number of precision optoelectronic components are integrated in the lidar, and the technological level is very high. The current shortage of products in the market that meet the standards of car regulations has affected the enthusiasm of car companies to use lidar products to a certain extent.
Millimeter Wave Radar
Millimeter-wave radar is also a class of environmental sensors with relatively mature technology, and its performance advantages are concentrated in the two dimensions of speed and range measurement and robustness.

Internal structure of millimeter wave radar
However, because the millimeter wave is significantly affected by the attenuation and absorption of the atmosphere, it cannot perform accurate and continuous modeling of obstacles in the dynamic process of vehicle driving. As a result, millimeter-wave radar can only solve the problem of "seeing" but not the problem of "seeing clearly" for the automatic driving perception system.
Ultrasonic Radar
Ultrasonic radar uses ultrasonic waves as the sensing medium, and calculates the relative position and distance between the vehicle and the objects in the measurement area by calculating the time difference between sending and receiving ultrasonic waves, the detection accuracy is extremely high.
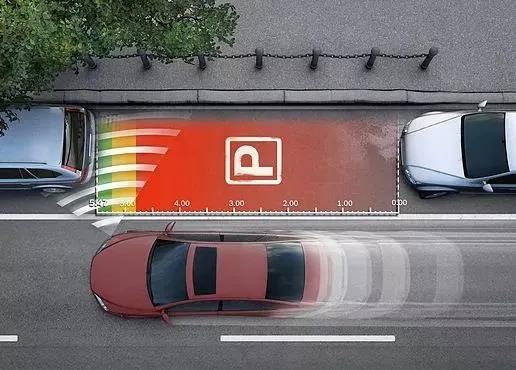
Main application scenarios of ultrasonic radar: automatic parking
However, the effective detection range of ultrasonic radar is very short, and the transmission and reception of ultrasonic waves are more susceptible to weather conditions than millimeter waves. In high-speed environments, the ultrasonic ranging error will also increase due to the low speed of the detection medium. This makes its application scenarios limited to low-speed scenarios.
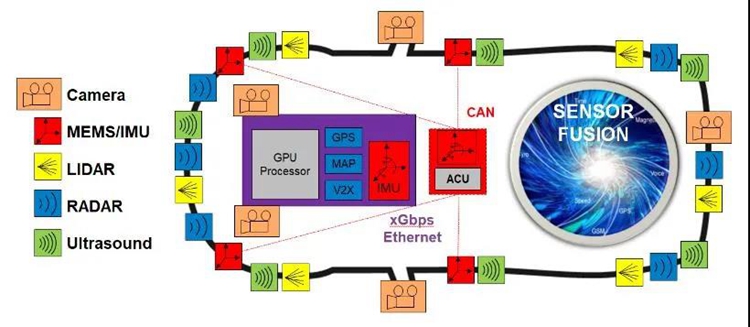
What is the best solution for sensor fusion?
Four mainstream sensors with distinctive features and their respective strengths form the "main lineup" of the autonomous driving perception system. However, to achieve high-level autonomous driving, it is not enough to rely on simple stacking and juxtaposition of different sensors. Through a clear, organic and unified sensor fusion scheme, the "chemical reaction" between the core sensors is stimulated to achieve better performance. The perceptual performance of the self-driving vehicle and the auxiliary sensor to complement the overall capability of the system are necessary to create an autonomous vehicle perception system.
The camera is cost-effective and the technology is mature. Whether from a cost or production perspective, car companies have no reason to abandon it in the process of building self-driving vehicles. Ultrasonic radar, because of its weak and robust sensing medium and very limited detection range, is destined to be unable to become the core of the sensing system.
In this way, "lidar + camera" and "millimeter wave radar + camera" are currently the two most recognized sensor fusion solutions in the industry.
Millimeter-wave radar can effectively make up for the problem that the original data collected by the camera does not have depth value information, which is the fundamental reason why some car companies choose this solution. However, the target resolution of millimeter wave radar is very low, and the size and contour of the target cannot even be determined in some scenes. The fusion of the two is more like a millimeter-wave radar "one-way" camera, rather than mutual achievement. This means that the bottom-level and in-depth fusion cannot be achieved between the two, and more often they can only be used in the form of "simplified fusion" to solve some target speed measurement or trajectory tracking problems.
Although in recent years, under the impetus of technological innovation and progress, millimeter-wave radar has repeatedly broken through the performance ceiling of resolution and other performance, but with it comes problems such as the high price of cutting-edge products and the premature application of large-scale applications.The "millimeter wave radar + camera" has become a "maybe the future can be seen, but the present cannot be grasped".
Lidar is hailed as the "eye of autonomous driving" by the industry. In terms of perception performance alone, it ranks first among all types of sensors required by autonomous driving systems. Lidar emits and receives high-frequency lasers to obtain location information, which allows it to achieve extremely high ranging accuracy and anti-environmental interference capabilities. Compared with other 3D sensors, the range of lidar has obvious advantages.
Take the C-Fans series of solid-state lidars in the navigation product line of Surestar: This series of products is the first domestic front-mounted lidar with a complete car-specific design, with a resolution of 0.1°x0.1° and a full range of The azimuth scanning field of view can easily realize large-scale and long-distance area monitoring, and provide a wide field of view in difficult scenes such as unprotected left-turning, etc., so as to take care of vehicles or pedestrians on the right.
The ultra-high frame rate of the sports camera level gives this lidar a powerful field of vision and the ability to capture abnormal events, whether it is detecting obstacles, or ghost probes, high-speed merging into the main road, high-speed sudden braking and automatic driving difficult scenes It has a good performance underneath, which is more suitable for high-speed, dynamic and complex real driving environment.
Although lidar is slightly inadequate in the realization of perception due to factors such as the launch angle of high-frequency lasers, for example, when lidar detects distant objects, the position point information obtained is often sparse. The difference in reflectivity of high-frequency lasers Material to distinguish obstacles is slightly insufficient in the complex real driving environment. However, the integration with the camera is a way to complement these shortcomings and bring the overall perception of the system to a higher level.
Under the premise of completing the calibration and synchronization of the lidar and the camera, the point cloud of the lidar can be calibrated and projected onto the image plane of the camera to form a relatively sparse but very accurate depth map. Combined with the results of image algorithm processing, the autonomous driving perception system can obtain accurate and dense depth information data with almost no blind spots, smooth out the influence of the slightly sparse local point cloud when detecting long-distance targets, and can also pass the height of the camera. The resolution real-life image enhances the ability to distinguish different obstacles with similar positions of the same material. In this way, the relative distance, position profile, and moving speed of obstacles can be accurately grasped within a large detection range, and the robustness of the entire sensing system is significantly improved.

At the same time, domestic and foreign LiDAR manufacturers such as Surestar have made great progress in LiDAR product wiring harness, miniaturization, vehicle compliance, and cost control in recent years. Completed and strengthened the weak links in the overall capability system of lidar products one by one, let the "lidar+camera" sensor fusion solution be able to meet the needs of car companies and car owners for autonomous driving perception systems at this stage and in the future. Achieving "firmly based on the present and firmly grasping the future" also makes the throne of the core essential sensor of the lidar autopilot perception system more stable and long-term.(www.isurestar.net)