
"Percepción, toma de decisiones y ejecución" entre los tres elementos principales de la conducción autónoma, la "percepción" es sin duda el más importante.
Si un vehículo autónomo quiere reemplazar al conductor para hacerse cargo de la operación del vehículo, debe tener una percepción más fuerte que los seres humanos. Si no se puede lograr una percepción precisa, la toma de decisiones y la ejecución son imposibles. La realización de una percepción segura, confiable y precisa no puede lograrse con un solo producto o tecnología por sí solo.
En esta etapa, los modelos de piloto automático L3 se están produciendo en masa y poniéndose a la venta, lo que realmente abre la puerta al piloto automático de gama alta. Ya se trate de empresas de automóviles, fabricantes de sensores o gigantes tecnológicos, todos creen que solo mediante la aplicación de la fusión de sensores pueden satisfacer las necesidades de percepción de los vehículos autónomos de alta gama.
¡Hoy, Xiaohui llevará a todos a ver qué solución de fusión de sensores es la mejor opción para la conducción autónoma!
Para lograr una percepción precisa, no puede confiar en la "lucha única"
No es necesario repetir la importancia de los sensores para los vehículos autónomos. Entre los tres elementos principales de la conducción autónoma, la percepción es la base para la toma de decisiones y la ejecución, y también es la pieza más crítica del rompecabezas en el proceso de conducción autónoma en el pleno sentido de su realización.
Sin embargo, la realización de una percepción segura, fiable y precisa no puede lograrse únicamente con un determinado tipo de sensor. Como el llamado "A veces, un pie puede resultar corto, mientras que una pulgada puede resultar larga", los sensores convencionales actuales no son los "guerreros hexagonales" que son completamente capaces de realizar tareas de detección de vehículos autónomos por sí solos.
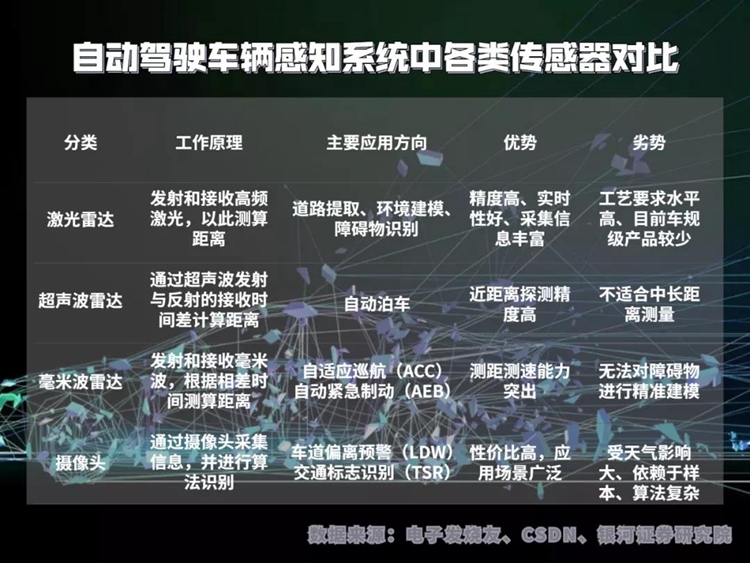
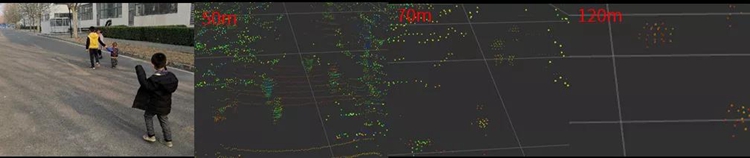
LIDARtiene ventajas sobresalientes como alta precisión, medición de largo alcance, buen rendimiento en tiempo real y rica recopilación de información. En los últimos años también ha avanzado mucho en mazos de cables, miniaturización, cumplimiento de la normativa vehicular y control de costes. Sin embargo, cuando se detectan objetos distantes, la información de posición obtenida por lidar suele ser escasa. Basándose en la diferencia de la reflectividad del láser de alta frecuencia para distinguir los obstáculos de los materiales, es ligeramente insuficiente en el complejo entorno de conducción real.
La tecnología de radar de ondas milimétricas está madura, pero debido a que la onda milimétrica se ve significativamente afectada por la atenuación y absorción de la atmósfera, el radar de ondas milimétricas no puede realizar un modelado preciso y continuo de obstáculos en el proceso dinámico de conducción de vehículos.
Aunque la tecnología de la cámara también es muy madura y tiene una alta resolución, tiene un campo de visión limitado y solo puede enfocar en un campo de visión limitado. Además, los datos o las imágenes que obtiene son bidimensionales, sin información sobre el valor de la profundidad, y no pueden reflejar con precisión la distancia relativa de los diferentes objetos dentro del rango de detección.

La cámara solo puede enfocar en un campo de visión limitado
La precisión de detección del radar ultrasónico es extremadamente alta, la distancia de detección es muy corta y la transmisión y recepción de ondas ultrasónicas son más susceptibles a las condiciones climáticas que las ondas milimétricas. En un entorno de alta velocidad, el error de rango ultrasónico aumentará debido a la baja velocidad del medio de detección.
Aunque también hay "fundamentalistas" como Tesla, que siempre se adhieren a la línea de la pura percepción visual. Pero, en general, las soluciones que integran diferentes tipos de sensores son las más populares en la industria de la conducción autónoma.
La "respuesta estándar" para la fusión de sensores
Sin embargo, también es bastante difícil implementar aplicaciones de fusión para diferentes tipos de sensores. Algunos sensores son inherentemente difíciles de fusionar y algunas fusiones entre sensores no valen la pena.
Por ejemplo, entre los sensores ultrasónicos y lidar y los radares de ondas milimétricas, aunque detectan diferentes medios, sus principios de funcionamiento son similares y lidar es muy superior a los otros dos sensores en términos de rendimiento de detección.
Por ejemplo, C-Fans-256, el primer lidar de estado sólido con calibre para automóviles de 256 líneas del mundo lanzado oficialmente porestrella seguraNo hace mucho tiempo: los productos de la serie C-Fans son los primeros lidar domésticos montados en el frente con un diseño completo de calibre de automóvil como una serie. El último producto en China, C-Fans-256 tiene una resolución de 0,1°x0,1°. Con su campo de visión de escaneo omnidireccional, puede realizar fácilmente un monitoreo de área a gran escala y de larga distancia, y vehículos autónomos, como girar a la izquierda sin protección. Proporcionar un amplio campo de visión en escenas difíciles, para cuidar los vehículos. o peatones a la derecha.
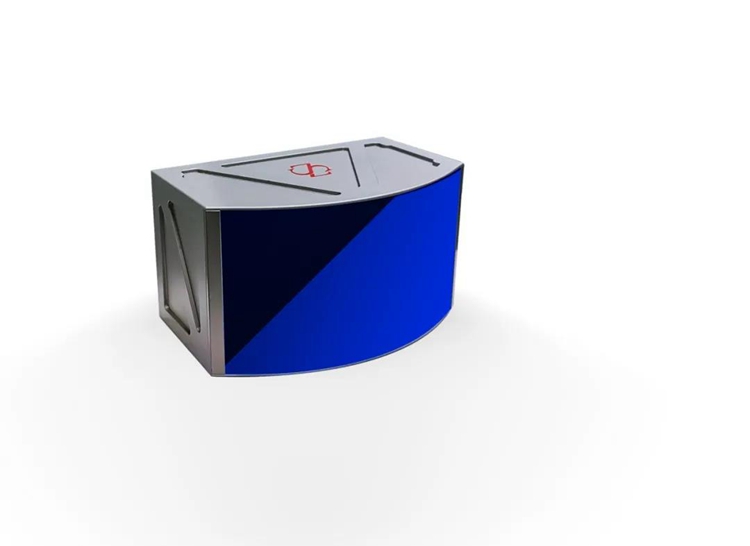
El primer 256 del mundo.hazlidar de estado sólido de grado automotriz C-Fans-256
La velocidad de cuadro ultra alta del nivel de la cámara deportiva le da a este lidar un poderoso campo de visión y la capacidad de capturar eventos anormales, ya sea detectando obstáculos o sondas fantasma, incorporándose a la carretera principal a alta velocidad, eventos repentinos a alta velocidad Escenas difíciles de frenado y conducción automática. Tiene un buen rendimiento por debajo, que es más adecuado para un entorno de conducción real complejo, dinámico y de alta velocidad.
En la actualidad, el lidar evolucionado ha sido ampliamente reconocido como el sensor central esencial en la conducción autónoma con su rendimiento integral y sobresaliente. Si los tres se fusionan, es probable que el resultado que obtengamos sea "1+1+1=1", que no puede reflejar las ventajas de los sensores ultrasónicos y los radares de ondas milimétricas.
Aunque el radar de ondas milimétricas puede compensar eficazmente el problema de que los datos originales recopilados por la cámara no tienen información de valor de profundidad, la resolución del objetivo del radar de ondas milimétricas es muy baja y ni siquiera se puede determinar el tamaño y el contorno del objetivo. en algunos escenarios. Ver" pregunta. Esto hace que sea imposible lograr una integración profunda y de bajo nivel entre los dos, y más a menudo solo se pueden usar en forma de "integración simplificada" para resolver algunos problemas de medición de velocidad objetivo o seguimiento de trayectoria.
Ya sea la gran mayoría de los modelos de piloto automático L3 actualmente en el mercado o las soluciones de piloto automático de nivel superior que se han lanzado, han elegido una solución de percepción basada en "lídar + cámaray asistido por otros sensores ambientales.
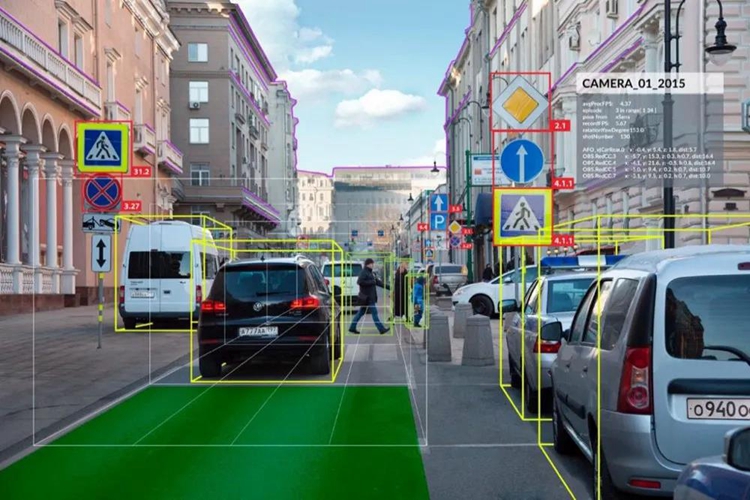
Un esquema de fusión actual de "lidar + cámara" convencional
¿Por qué entre todo tipo de sensores, ya sean empresas de automóviles o gigantes tecnológicos, todos centran su atención en lidar y cámaras?
En general, se debe a que los dos pueden estar bien integrados para lograr el objetivo final de "aprender de las fortalezas de cada uno", de modo que el sistema de conducción autónomo pueda realmente tomar el "largo" y compensar todos los "cortos". Puede llamarse la "respuesta estándar" para la fusión de sensores en los sistemas de percepción de conducción autónoma.
Lidar + Cámara = Futuro
Lidar es aclamado como el "ojo de la conducción autónoma" por la industria. Solo en términos de rendimiento de percepción, es el mejor sensor de todos los tipos requerido por un sistema de conducción autónoma. El lidar emite y recibe láseres de alta frecuencia para obtener información de posición, lo que le permite lograr una precisión de alcance extremadamente alta y resistencia a la interferencia ambiental. En comparación con otros sensores 3D, la gama de lidar tiene ventajas obvias.
Lidar tiene excelentes capacidades de detección
El lidar de estado sólido de ultra alta resolución a nivel de imagen C-Fans-256 desarrollado porestrella segurapuede capturar con precisión la información de posición y puntos de vehículos y peatones a una distancia de 200 m, y puede identificar con precisión obstáculos cúbicos con una longitud lateral de 20 cm. La distancia efectiva también es de casi 60 m.
C-Fans-256 también logra un consumo de energía de menos de 16 W y tiene un alto cumplimiento de cumplimiento del vehículo con un total de 31 pruebas en 9 categorías de ISO16750, y puede funcionar de manera estable y normal en entornos hostiles como frío y calor severos, alta temperatura y humedad, golpes fuertes, etc. Además, otro producto de la misma serie, C-Fans-32, es actualmente el único producto lidar que ha pasado la certificación de "intrínsecamente seguro".
Como sensor de imagen que existe desde hace mucho tiempo, la cámara tiene un costo relativamente bajo. No solo la cadena de la industria relacionada, sino que la cámara también es muy madura en tecnología. Además, la cámara tiene una alta resolución y la estimación de información de profundidad densa a larga distancia se puede obtener a través del procesamiento de algoritmos.
Aplicación de cámara en coche sin conductor.
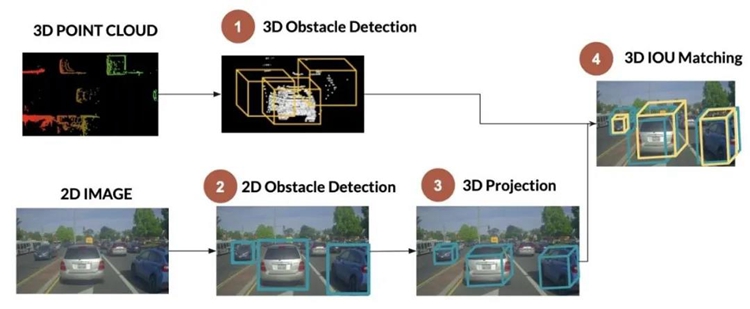
Bajo la premisa de completar la calibración y sincronización del lidar y la cámara, la nube de puntos del lidar se puede calibrar y proyectar en el plano de la imagen de la cámara para formar un mapa de profundidad relativamente escaso pero muy preciso. Combinado con los resultados del procesamiento del algoritmo de imagen, el sistema de percepción de conducción autónomo Es posible obtener datos de información de profundidad precisos y densos casi sin callejones sin salida, para realizar la comprensión precisa de la distancia relativa, el perfil de posición y la velocidad de movimiento de los obstáculos. en un amplio rango de detección.
Para lidar, la cámara no solo puede suavizar la influencia de la nube de puntos local ligeramente escasa al detectar objetivos de larga distancia, sino que también mejora la resolución de diferentes obstáculos con el mismo material y posiciones similares a través de la escena real de alta resolución de la cámara. imagen.
La existencia de lidar mejora en gran medida el problema de la baja precisión de estimación de profundidad de la cámara como sensor de detección pasiva y mejora significativamente la estabilidad y robustez de todo el sistema de detección. La "reacción química" producida por la combinación de los dos permite que el rendimiento del sistema de percepción de conducción autónoma evolucione y logre una percepción precisa verdadera.

Lidar + fusión de cámara (fuente de datos: conjunto de datos KITTI)
Aunque hay muchos temas esperando a que la gente explore los avances en el camino de la aplicación de la fusión de cámara y lidar, como "cómo proyectar mejor la nube de puntos en la imagen", "cómo garantizar que la coincidencia sea verdadera y efectiva". , y "la precisión del seguimiento de funciones" Cómo mejorar aún más "y así sucesivamente.
Sin embargo, dado que los automóviles autónomos L3 están en el mercado uno tras otro, hoy en día, a medida que la pista lidar continúa incendiándose, no solo las empresas de automóviles, sino también los fabricantes veteranos de lidar comoestrella segura, que han estado profundamente involucrados en la investigación y el desarrollo de productos durante más de diez años, también han comenzado a explorar en profundidad la integración de lidar y cámaras. Creo que la "integración perfecta" de LiDAR y cámaras no lleva mucho tiempo. para convertirse en una realidad. Acerquémonos a un nuevo futuro donde la conducción autónoma sea madura y popular. (www.isurestar.net)