Skylark application (1): Water conservancy construction survey
1. Background
The project is located in an industrial park of a city in Guangdong, south-eastern China. The industrial park is built at the foot of a mountainous area and in rainy seasons, rainwater flowing off the mountain often inundates the industrial park. To mitigate the flooding, the relevant government departments decided to build a drainage channel at the base of the mountain to divert the water away from the industrial park. The length of the proposed area is about 18km with width ranging from 200m to 1500m. See Figure 1. A detailed terrain model was required to facilitate the channel's design.
XXX was engaged to perform a LiDAR survey of the area and produce the required deliverables. A SureStar Skylark system was chosen for the survey.

Figure 1. Diagram of the project area (outlined in blue)
2. Project deliverables
An editable digital terrain model of the area shown in Figure 1.
A longitudinal section at the junction between the hill slope and industrial park boundary and cross-sections every 50m. See the attached drawings for the specific scope and line.
CAD drawings in DWG format:
Plan at 1:500
Longitudinal section at 1:500
Cross-sections at 1:200
Measurement handbook and work photos
3. Challenges
RMS height accuracy of 0.10m
A project period of 10 days
Dense vegetation cover
Irregular project area
4. Equipment
After a thorough understanding of the project, it was decided to use SureStar Skylark UAV LiDAR (Figure 2) system to perform data acquisition. Skylark is a lightweight airborne LiDAR system developed by SureStar. The LiDAR system integrates an optical camera synchronized to the LiDAR data acquisition. Skylark was mounted on an Eight-rotor drone (Figure 3).
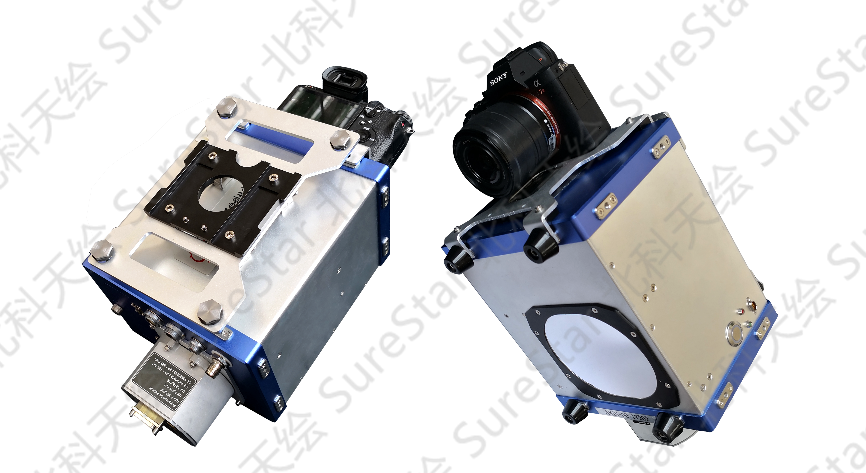
Figure 2. SureStar Skylark LiDAR system

Figure 3. Skylark on a Eight-rotor drone
The Skylark system specifications and features are:
Maximum range: 800m @ 20% reflectivity, 1300m @ 60% reflectivity
Typical operating height: 50 ~ 600m
Pulse rate (Tx & Rx): 600,000 p/s
Scanning mode: Oblique rotating mirror
Range accuracy: 5 ~ 10mm @100 m
Position accuracy: 0.05 ~ 0.35
Attitude accuracy: pitch / roll: 0.01°, heading: 0.03°
Image resolution: 42 Mpix
System weight: 7.0kg (all equipment)
Point density: > 100pts/m² (h = 200m)
Accuracy: elevation < 5cm, plane < 15cm
Data storage: pluggable U disk
Endurance:40 minutes
5. Project execution
5.1. Flight planning
The SS-NAV flight planning management software (standard with the Skylark system) was used to plan the route of the survey area. As shown in Figure 4, the project site was divided into seven flight areas. Except for the large area at the right-hand end which required two sorties, each area contained one sortie.
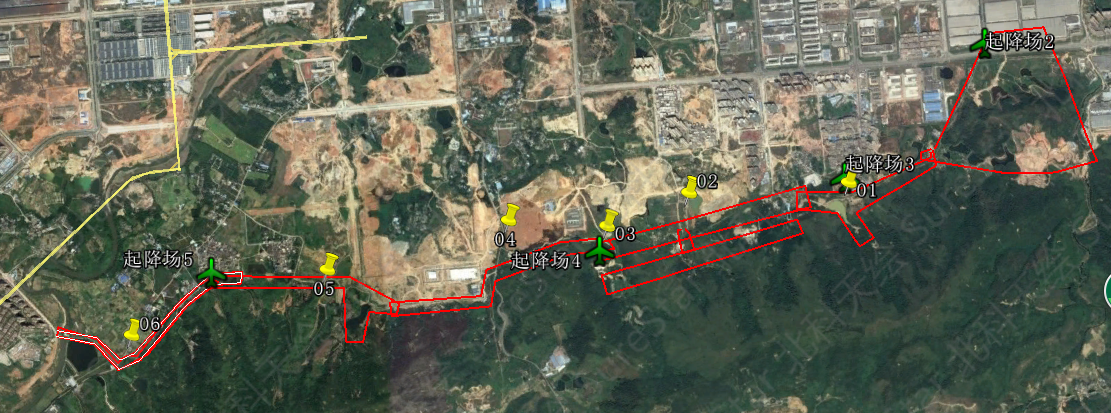
Figure 4. The seven project areas with operation sites marked by green aircraft
5.2. Project control
GNSS base stations were established for each flight area to provide differential GNSS determination of the flight trajectories. A total of 6 base stations are set up in this project.

Figure 5. GNSS base station for area 2
Skylark's operational efficiency allowed the LiDAR data acquisition to be completed in 1.5 days. Five sorties were completed on the first day and 3 in the morning of the second day. After the completion of data collection, a quality control check of all sorties was performed via GNSS check point measurement (Figure 6).

Figure 6. A check point and GNSS survey
5.3. Data pre-processing
The base station and Skylark POS data were fused with differential processing techniques in the SS-GINS software to create a high-precision flight trajectory data. The trajectory and observed LiDAR data were then combined to produce a LAS-format point cloud of the project area. Some data statistics are presented in Table 1 and images of the point clouds in
Table 1. Point cloud statistics
Item | Size | Format |
Observed Skylark data | 12GB | *.IMP (customisable) |
Image data | 18GB | *.JPG |
Produced point cloud | 25GB | *.LAS |
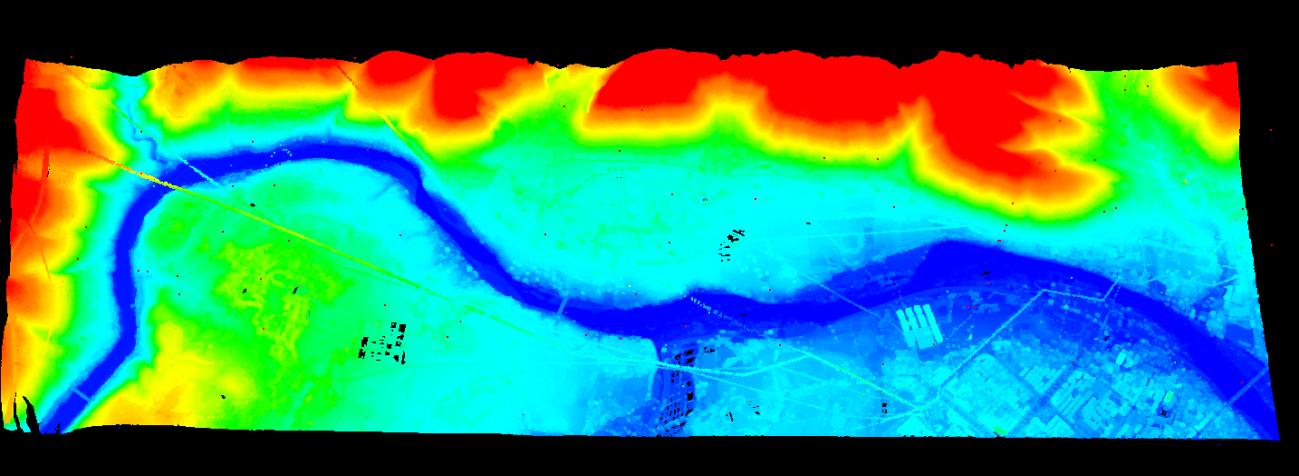
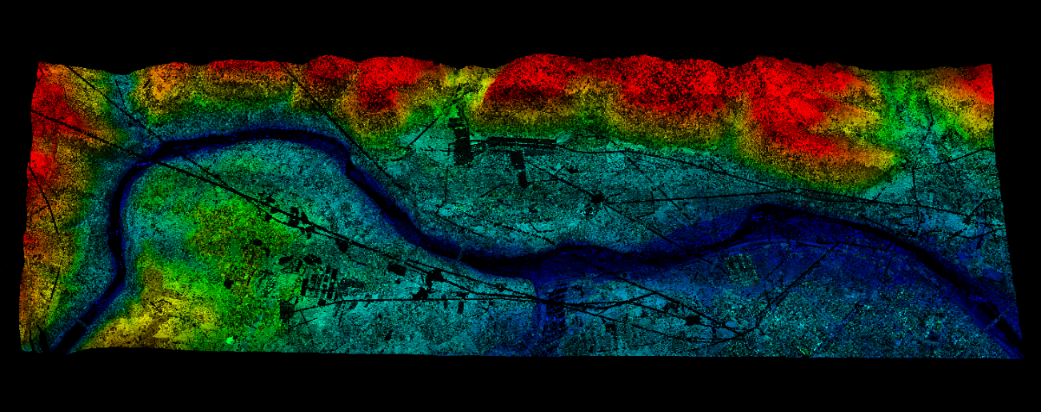
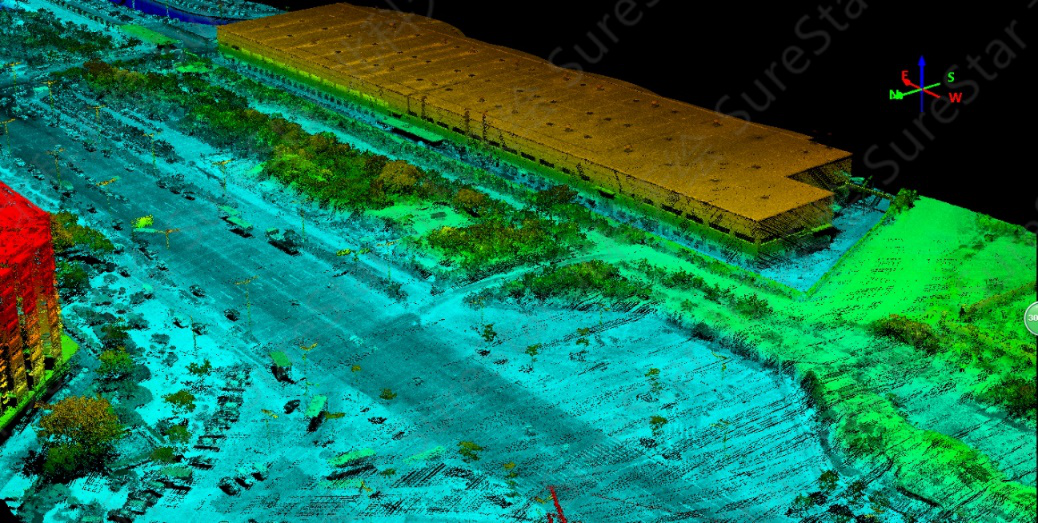
Figure 7. Sample point cloud views
5.4. Data post-processing
5.4.1. Point cloud classification
The point cloud data was classified using TerraSolid software. The data was divided into five classes, firstly by the automatic process and then refined by interactive processes:
ground points
vegetation
roads
houses
power facilities.
The classified point cloud data is shown in Figure 8.
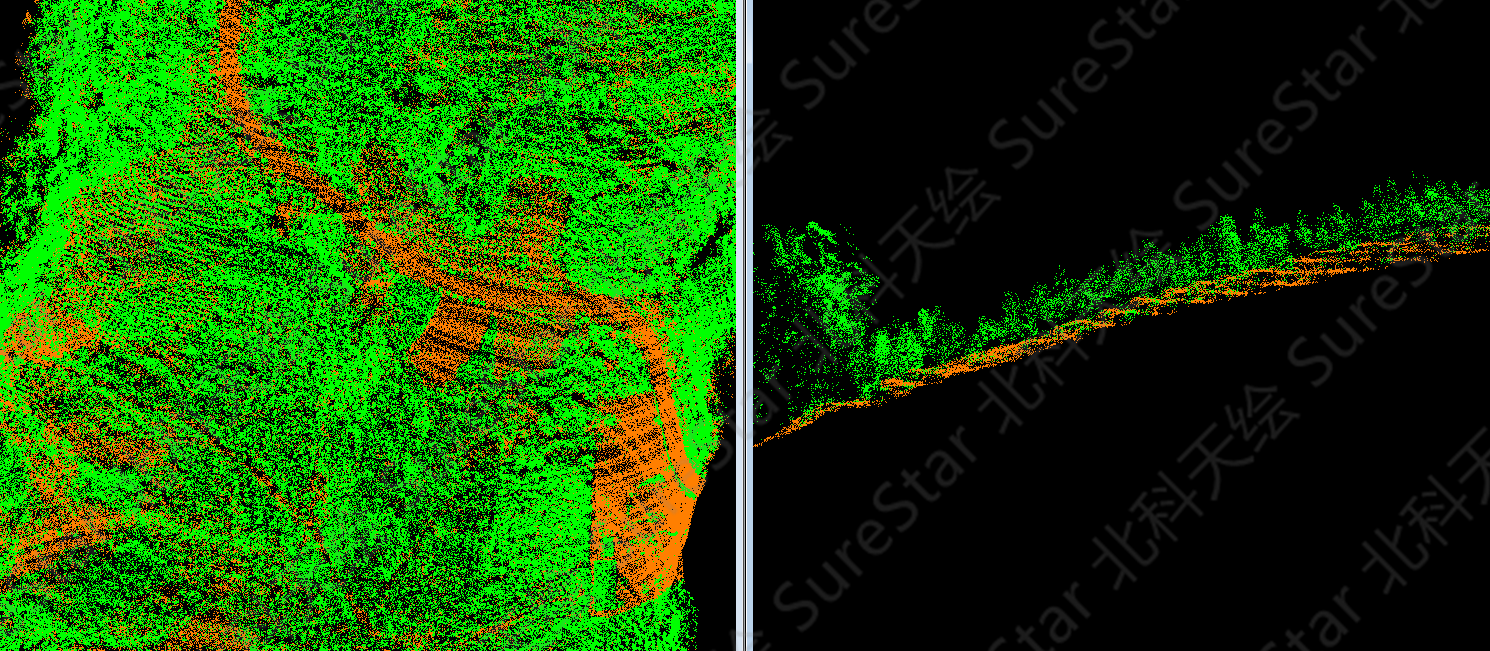
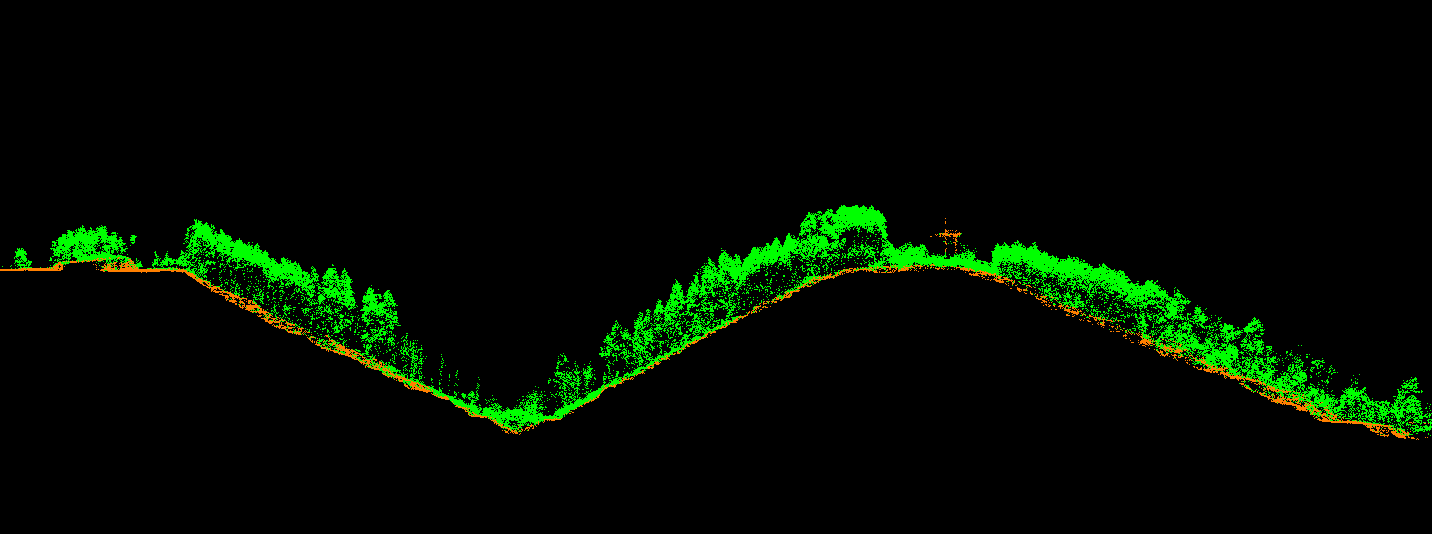
Figure 8. Classified point cloud samples
5.4.2. DEM
The point cloud was automatically triangulated, and a height-coded DEM produced. See Figure 9.
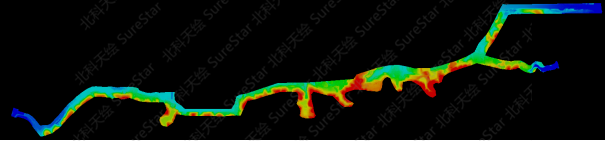
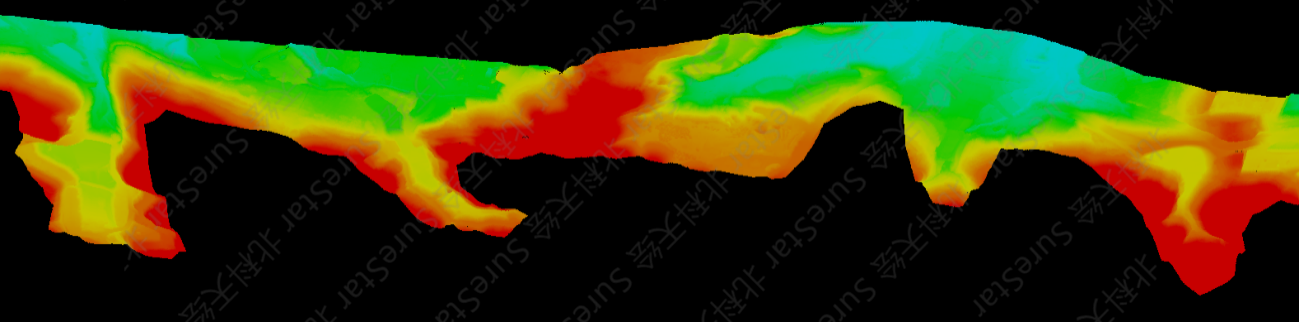
Figure 9. The DEM. Overall (top) and enlarged portion (bottom)
5.4.3. Digital orthoimage map (DOM) and line graph (DLG)
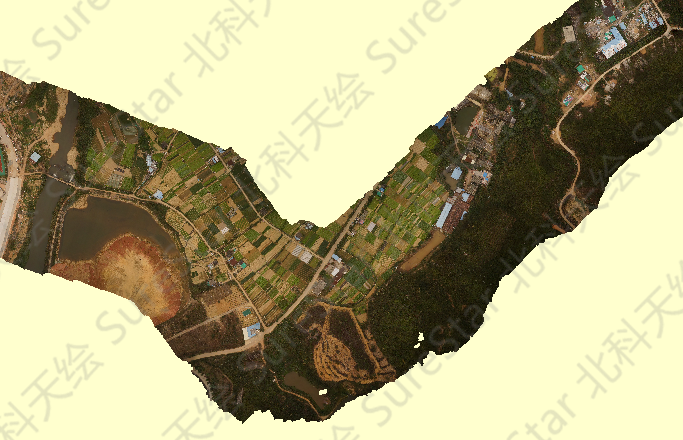
Figure 10. Sample DOM

Figure 11. DLG of the project site
5.4.4. Section generation
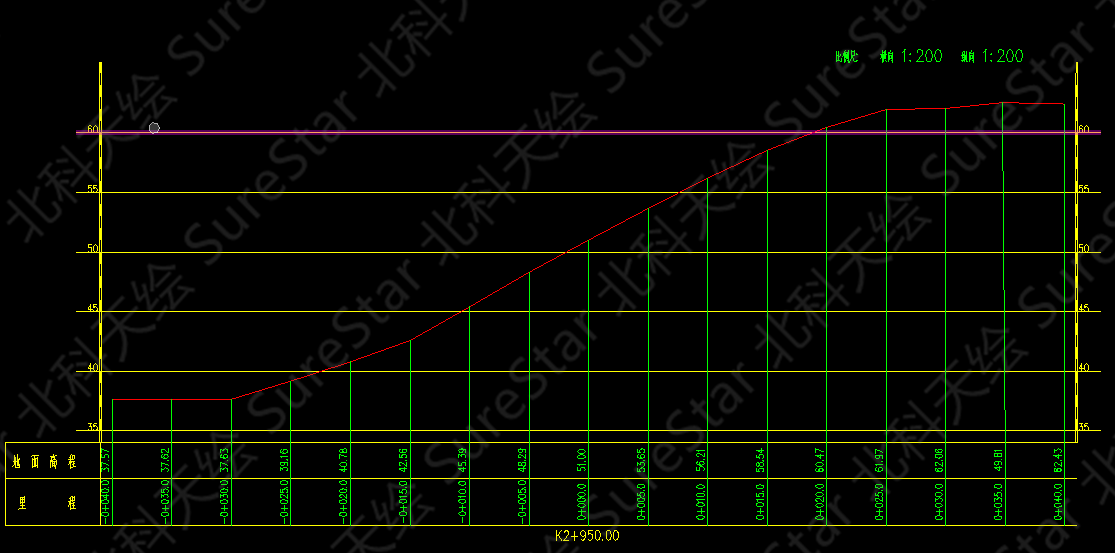
Figure 12. A sample cross-section
6. Accuracy check
After the generation of the point cloud, the elevations of 100 checkpoints were manually measured in the survey area to verify the accuracy of the point cloud. The coordinates of the checkpoints were imported into TerraSolid and compared with the nearest point in the point cloud. An extract from the accuracy check report showing the final statistics in presented in. It shows the RMS height error was 0.057m which was well inside the required height accuracy of 0.10m.
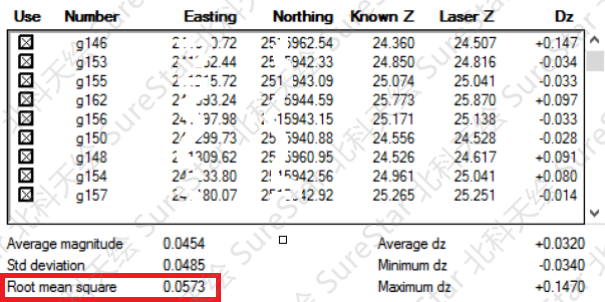
Figure 13. Height accuracy check report
7. Project summary
The advantages of Skylark UAV lidar system compared with other traditional methods are as follows:
1) Convenient and flexible operation, suitable for surveying and mapping of small-scale irregular survey areas
2) The scanning method of inclined ellipse, 100% pulse capture, and the extremely high point density ensures the quality of the data
3) High elevation accuracy, the elevation accuracy is better than 5cm without control which is suitable for high-precision engineering surveys
4) Multi-pulse echo mode, which can obtain high-precision terrain coordinate data through dense vegetation
5) High cost-effective LiDAR equipment and guaranteed efficient customer service