
С быстрым развитием общества и экономики и постоянным повышением осведомленности людей о безопасности, проекты топографической съемки и картографирования стали проблемой, вызывающей всеобщее беспокойство в обществе, что также выдвигает более высокие требования к проектам топографической съемки и картографии. В то же время, с другой стороны, проект топографической карты также в определенной степени представляет собой процесс развития города.
История проекта
Район исследования расположен в холмистой горе где-то в городе Ланчжун, провинция Сычуань, с густыми горами и лесами и сложными формами рельефа. Рельеф местности в районе съемки сильно изменчив, а лесной покров большой. Обычная цифровая аэрофотосъемка и традиционные измерения сложны, и трудно проводить всесторонние наблюдения. Традиционные искусственные. Результаты съемки и картографирования местности, полученные с помощью геодезической техники или аэрофотосъемки, имеют такие проблемы, как низкая степень уточнения и длительный рабочий цикл, которые требуют больших трудовых и материальных ресурсов. Использование бортовоголидардля картографирования местности может быстро и эффективно получать высокоточные данные облака точек и строить цифровую модель высот (DEM) из наземных данных облака точек. Согласно ЦМР, можно извлечь большое количество информации о морфологии поверхности, которую можно использовать для рисования и т. д. High Line и т. д.

Требования к проекту
У этого проекта плотный график и тяжелые задачи. Требуется получить топографическую карту масштаба 1:500, точность высот лучше 5 см, плотность точек больше 16 точек/м², построение ЦМР и создание горизонталей.
Учитывайте такие факторы, как скорость и высота полета, выносливость самолета и колебания рельефа местности в районе съемки. В качестве летной платформы проект использует вертикально-горизонтальный вертикально-горизонтальный самолет CW-25E, оснащенныйЛидарная система Skylark, который проникает в растительный покров с помощью мульти-эхо лидара, извлекает высокоточные ЦМР, а затем быстро создает топографические карты.
Порядок работы
Высота 350 м / интервал 300 м / полет туда и обратно, скорость полета 72 км/ч; заданная частота 180 кГц, скорость вращения 3000 об/мин; он может соответствовать крупномасштабному топографическому картированию 1: 500.
Преимущества лидарной системы Skylark
Лидарная система Skylarkсостоит из лидара АК-1500, интегрированной инерциальной навигационной системы, цифровой камеры и блока питания. Полный вес системы составляет около 3,5-5,5 кг, поэтому он подходит для большинства полетных платформ и имеет следующие преимущества:
| Типы | Параметр | Эффект |
| Рабочая высота | 100-700м | Большая площадь падения может обеспечить эффект работы |
| Поле зрения | 70°×40° | Большая пропускная способность повышает эффективность работы |
| Точность высоты | ±5 см | Познакомьтесь с крупномасштабными геодезическими и картографическими проектами |
| Максимальная дальность | 1500м | Чем больше максимальная дальность, тем выше высота полета |
Фактическая эффективность работы
| Тип данных | 1 боевой вылет |
| Необработанные данные | 29,7 ГБ |
| После предварительной обработки | 29,4 ГБ (лас) |
| Время предварительной обработки данных | 1,5 часа |
| Время полета | 1ч50мин |
| Зона полета | 33 квадратных километра |
Дисплей достижения данных
[1] С помощью интеграционного программного обеспечения StarSolve, независимо разработанного Surestar, решение по объединению траектории полета и исходного облака точек было завершено за 1,5 часа.
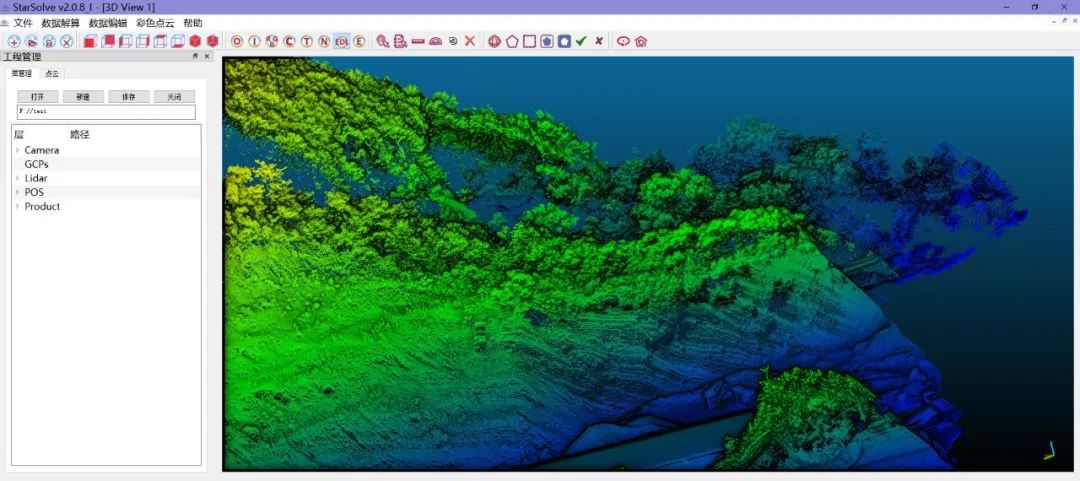
[2] После выполнения таких операций, как шумоподавление облака точек, исходные данные получаются, как показано на рисунке:
[3] Заказчик выполнил проверку высоты для облака точек, и результат проверки показан на рисунке ниже; видно, что различные ошибки высоты составляют 2,68 см. Удовлетворить потребности картографирования в масштабе 1:500.
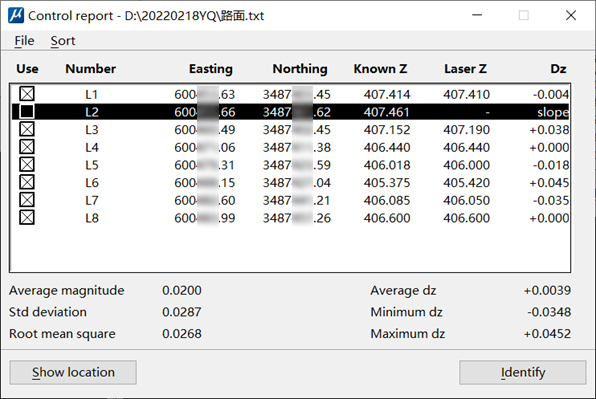
Проверка точности высоты
[4] Skylark обладает характеристиками четырех эхо-сигналов, которые могут проникать сквозь растительность, получать более непрерывные наземные точки и более точно строить наземные модели. Эффект проникновения растительности показан на рисунке:
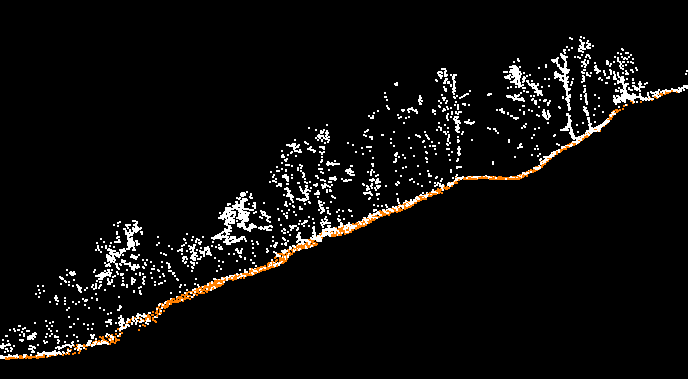
Эффект проникновения в растительность
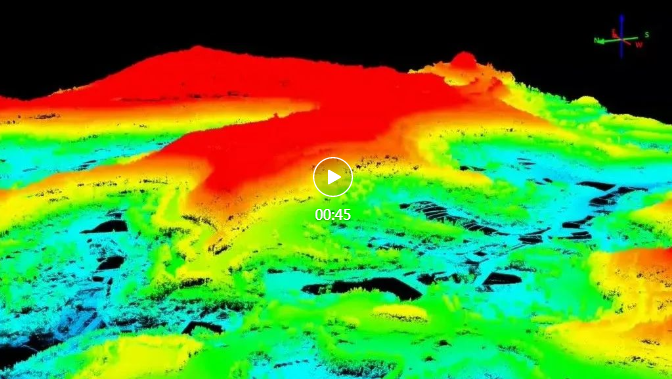
[5] Облака точек с высокой плотностью могут более точно выбирать характерные точки и отображать топографию поверхности. На основе облака точек с удаленным шумом сначала выполняется ручное вмешательство для получения точных данных облака точек поверхности, а затем программное обеспечение автоматически генерирует высокоточную ЦМР на основе данных точек поверхности.
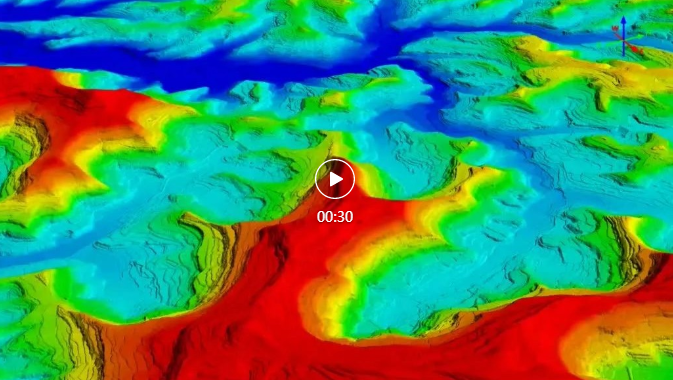
ЦМР
[6] Обрежьте данные ЦМР, извлеките данные в требуемом диапазоне и создайте изолинии.
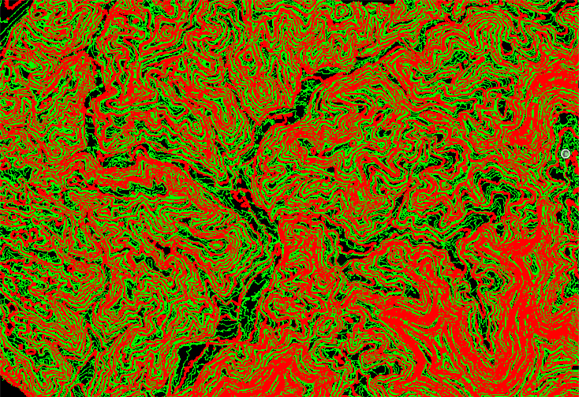
Генерация контурных линий через ЦМР