
Quando a Tesla enfatizou os defeitos funcionais do software FSD, mencionou alguns casos extremos, como: "Objetos estáticos, como detritos da estrada, veículos de emergência, áreas de construção, cruzamentos complexos, quaisquer obstruções, clima adverso e tráfego intenso. , Sondas fantasmas , motocicletas que não seguem as regras de trânsito, etc.
Esses problemas, do ponto de vista de P&D, são várias necessidades ou bugs não resolvidos, mas, do ponto de vista dos consumidores, esses problemas significam que o software FSD é extremamente perigoso.
Todos esses problemas podem ser resolvidos comlidar. TirandocertezaOs produtos da série C-Fans da empresa como exemplo, esses fatores foram considerados no início do projeto.
1.Alta resolução (0,1°×0,1°)

No processo de condução em rodovia urbana, pedestres que não seguem as regras de trânsito à distância e veículos que se movem acidentalmente para trás nas rodovias, alta resoluçãoLidarpode resolver os vários problemas encontrados pelo atual radar de ondas milimétricas e detecção de reconhecimento de vídeo. O sistema de planejamento de decisão fornece entrada sensorial estável. Embora os dados lidar em tempo real sejam uma nuvem de pontos esparsos, a linha C-Fans256 com sua resolução ultra alta de 0,1°×0,1° ainda pode atingir uma densidade de grade de 0,4m×0,4m a uma distância de 200m. Para um carro com largura de 1,8 m. Para um SUV comum com altura de 1,8 m, uma matriz de pontos 4 × 4 ainda pode ser vista a 200 m.
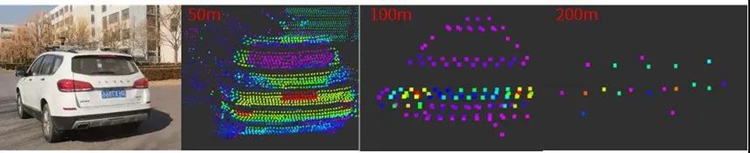
Figura 1 Nuvem de pontos medidos do veículo C-Fans256
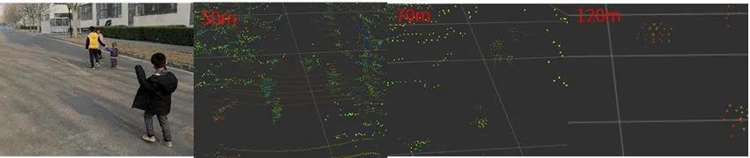
Figura 2 C-Fans256 nuvem de pontos medidos para crianças (altura e 1,1 m)

Figura 3 C-Fans256 nuvem de pontos medidos para pequenos obstáculos (20cm×20cm×20cm)
A alta resolução corresponde à alta densidade da grade, que pode realizar a detecção de obstáculos menores e mais distantes. Sob condições complexas de estradas urbanas, você pode encontrar detalhes distantes o mais rápido possível. Sob condução em alta velocidade, você pode detectar o movimento ou anormalidade de veículos distantes com antecedência. , Esta capacidade de detecção significa maior segurança.
2. Grande campo de visão (150°×30°)
Curva à esquerda desprotegida em cruzamentos e cenas de cruzamento complexas em áreas urbanas, FOV grande pode trazer informações de percepção ricas para veículos autônomos, especialmente ao completar movimentos de retorno, quanto maior for o campo de visão necessário, melhor, fornecido por C-Fans256 Com um FOV de 150° × 30°, pode fornecer uma ampla faixa de detecção quando o veículo vira à esquerda ou em U e melhora a segurança do sistema de direção automática.
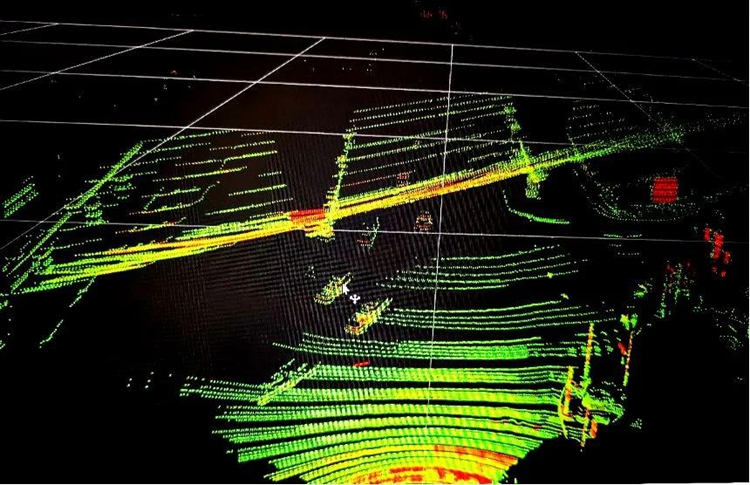
Figura 4 C-Fans256 nuvem de pontos
3. Alta taxa de quadros (80 Hz)
Em emergências, fusão de alta velocidade na estrada principal, frenagem repentina de alta velocidade e outros cenários, a capacidade de medição de contorno direta precisa e rápida do lidar pode ajudar veículos autônomos a responder em 100 milissegundos. O principal indicador neste momento é a taxa de quadros. Se a sonda fantasma ou um carro frear repentinamente, a velocidade relativa é de 80 km/h. Se a taxa de quadros do radar for 10 Hz, o algoritmo de rastreamento concluiu o cálculo em 5 quadros, o que significa que a distância de resposta do veículo é:
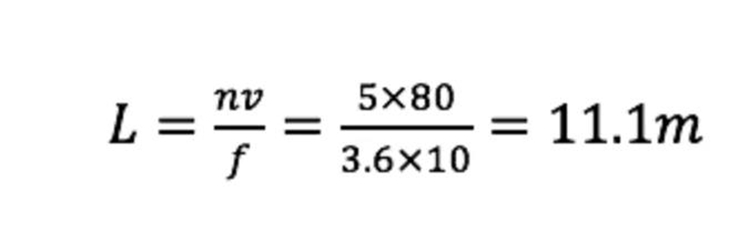
A partir do momento em que ocorreu o acidente o sistema começou a fazer um julgamento, a distância relativa entre os dois foi reduzida em 11,1m, e então foi incluída a distância de frenagem do veículo, o que obviamente significa um aumento do fator de risco.

Figura 5 Distância de resposta do veículo sob diferentes taxas de quadros (80 km/h)
Esta é uma das principais razões pelas quais a maioria dos veículos autônomos está operando em cenários de baixa a média velocidade e baixa dinâmica nesta fase. aumentou sua taxa de quadros para o nível de 80hz inédito na indústria, esperando contribuir com sua força para a realização da direção autônoma em ambientes complexos e dinâmicos de alta velocidade.
A alta taxa de quadros de 80 Hz traz detecção dinâmica suave e rápida. Em um ambiente de tráfego real, o tempo de detecção dinâmica de veículos não tripulados pode ser reduzido da ordem de centenas de milissegundos para a ordem de dez milissegundos, trazendo assim maior segurança.
4. Reconhecimento de tons de cinza

Figura 8 Efeito de reconhecimento da linha da pista à noite
A biblioteca de cenas L2 deve ser um subconjunto da biblioteca de cenas L3, como assistência de centralização de faixa LCC, assistência automática de mudança de faixa ALC, cruzeiro adaptável de velocidade total ACC, cruzeiro de curva adaptável ATC, partida de faixa LDW, etc. melhorar a condução automática Robustez do sistema à noite, entradas e saídas de túneis, etc.
Essas cenas dependem principalmente da detecção precisa do sensor de linhas de pista e acostamentos, o que apresenta requisitos para o nível de reconhecimento em escala de cinza do lidar, que requer reconhecimento preciso e preciso em escala de cinza.
O C-Fans-256 fornece resolução em escala de cinza de 8 bits, que pode realizar o reconhecimento claro da linha da pista em qualquer clima e melhorar a capacidade de percepção noturna do sistema de direção não tripulada.(www.isurestar.net)