
Quando Tesla ha sottolineato i difetti funzionali del software FSD, ha menzionato alcuni casi limite, come: "Oggetti statici, come detriti stradali, veicoli di emergenza, aree di costruzione, incroci complessi, eventuali ostacoli, condizioni meteorologiche avverse e traffico intenso. , Sonde fantasma , motocicli che non rispettano il codice della strada, ecc.
Questi problemi, dal punto di vista della ricerca e dello sviluppo, sono vari bisogni irrisolti o bug, ma dal punto di vista dei consumatori, questi problemi significano che il software FSD è estremamente pericoloso.
Questi problemi possono essere tutti risolti conlidar. PrendendoSurestarAd esempio, i prodotti della serie C-Fans di , questi fattori sono stati considerati all'inizio della progettazione.
1.Alta risoluzione (0,1°×0,1°)

Nel processo di guida in autostrada urbana, pedoni che non seguono le regole del traffico in lontananza e veicoli che si muovono accidentalmente all'indietro sulle autostrade, ad alta risoluzioneLidarpuò risolvere i vari problemi riscontrati dall'attuale radar a onde millimetriche e dal rilevamento del riconoscimento video. Il sistema di pianificazione delle decisioni fornisce input sensoriali stabili. Sebbene i dati lidar in tempo reale siano una nuvola di punti sparsa, la linea C-Fans256 con la sua altissima risoluzione di 0,1°×0,1° può comunque raggiungere una densità di griglia di 0,4 m×0,4 m a una distanza di 200 m. Per un'auto con una larghezza di 1,8 m. Per un normale SUV con un'altezza di 1,8 m, è ancora possibile vedere una matrice di punti 4×4 a 200 m.
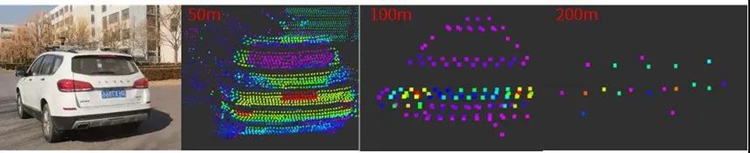
Figura 1 Nuvola di punti misurata dal veicolo C-Fans256
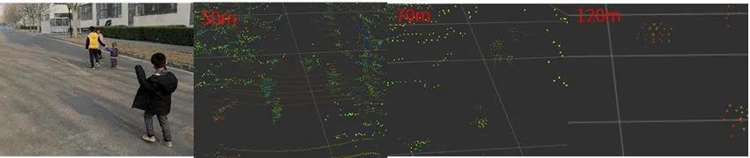
Figura 2 C-Fans256 nuvola di punti misurata per bambini (altezza e 1,1 m)

Figura 3 Nuvola di punti misurata C-Fans256 per piccoli ostacoli (20cm×20cm×20cm)
L'alta risoluzione corrisponde a un'elevata densità di griglia, che può realizzare un rilevamento di ostacoli più lontano e più piccolo. In condizioni stradali urbane complesse, puoi trovare dettagli distanti il prima possibile. Durante la guida ad alta velocità, è possibile rilevare in anticipo il movimento o l'anomalia di veicoli distanti. , Questa capacità di rilevamento significa maggiore sicurezza.
2. Ampio campo visivo (150°×30°)
Svolta a sinistra non protetta agli incroci e scene di intersezione complesse nelle aree urbane, l'ampio FOV può portare ricche informazioni sulla percezione ai veicoli autonomi, specialmente quando si completano i movimenti di inversione a U, maggiore è il campo visivo richiesto, meglio è, fornito da C-Fans256 Con un campo visivo di 150°×30°, può fornire un ampio raggio di rilevamento quando il veicolo svolta a sinistra o inversione a U e migliora la sicurezza del sistema di guida automatico.
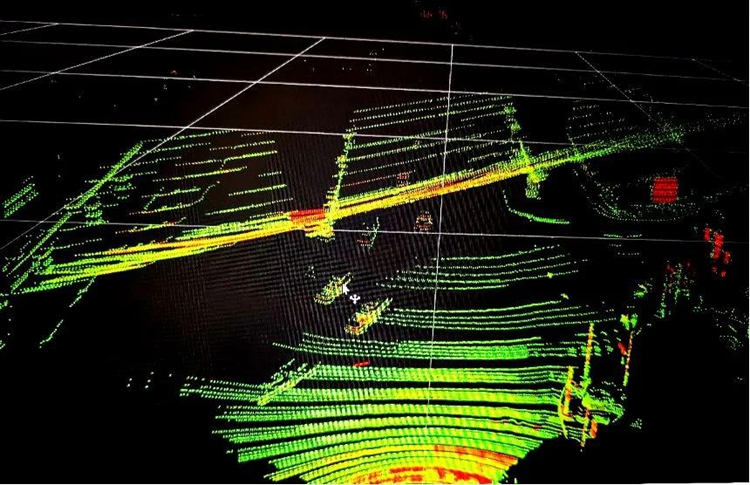
Figura 4 Nuvola di punti C-Fans256
3. Frequenza fotogrammi elevata (80 Hz)
In caso di emergenza, fusione ad alta velocità nella strada principale, frenata improvvisa ad alta velocità e altri scenari, la capacità di misurazione diretta precisa e rapida del profilo del lidar può aiutare i veicoli autonomi a rispondere entro 100 millisecondi. L'indicatore chiave in questo momento è il frame rate. Se la sonda fantasma o un'auto che frena improvvisamente improvvisamente, la velocità relativa è di 80 km/h. Se il frame rate del radar è 10hz, l'algoritmo di tracciamento ha completato il calcolo in 5 frame, il che significa che la distanza di risposta del veicolo è:
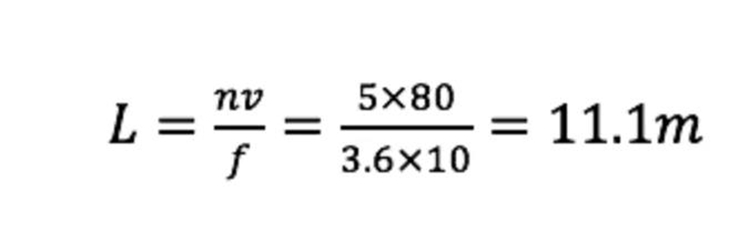
Dal momento in cui si è verificato l'incidente il sistema ha iniziato a dare un giudizio, la distanza relativa tra i due è stata ridotta di 11,1 m, e quindi è stata inclusa la distanza di frenata del veicolo, il che significa ovviamente un aumento del fattore di rischio.

Figura 5 Distanza di risposta del veicolo con frame rate diversi (80 km/h)
Questo è uno dei motivi principali per cui la maggior parte dei veicoli autonomi opera in scenari a velocità medio-bassa e bassa dinamica in questa fase. Al fine di migliorare il più possibile la capacità di percezione del sistema di guida autonomo, C-Fans256 ha aumentato il suo frame rate al livello di 80Hz inaudito nel settore, sperando di contribuire con la sua forza alla realizzazione della guida senza pilota in ambienti ad alta velocità, dinamici e complessi.
L'elevata frequenza dei fotogrammi di 80 Hz offre un rilevamento dinamico fluido e veloce. In un ambiente di traffico reale, il tempo di rilevamento dinamico dei veicoli senza equipaggio può essere ridotto dall'ordine di centinaia di millisecondi all'ordine di dieci millisecondi, aumentando così la sicurezza.
4. Riconoscimento in scala di grigi

Figura 8 Effetto del riconoscimento della corsia di notte
La libreria di scene L2 deve essere un sottoinsieme della libreria di scene L3, come l'assistenza al centraggio della corsia LCC, l'assistenza al cambio di corsia automatico ALC, la velocità di crociera adattativa a piena velocità ACC, la velocità di crociera adattiva ATC, la partenza della corsia LDW, ecc. L'uso di lidar può migliorare la guida automatica Robustezza del sistema di notte, ingressi e uscite di tunnel, ecc.
Queste scene si basano principalmente sul rilevamento accurato da parte del sensore delle linee di corsia e delle banchine stradali, che pone requisiti per il livello di riconoscimento della scala di grigi del lidar, che richiede un riconoscimento accurato e preciso della scala di grigi.
C-Fans-256 offre una risoluzione in scala di grigi a 8 bit, che può realizzare un chiaro riconoscimento della linea di corsia in qualsiasi condizione atmosferica e migliorare la capacità di percezione notturna del sistema di guida senza pilota.(www.isurestar.net)