
"Percezione, processo decisionale ed esecuzione" tra i tre elementi principali della guida autonoma, la "percezione" è senza dubbio il più importante.
Se un veicolo autonomo vuole sostituire il guidatore per subentrare nel funzionamento del veicolo, deve avere una percezione più forte degli esseri umani. Se non è possibile ottenere una percezione accurata, il processo decisionale e l'esecuzione sono impossibili. La realizzazione di una percezione sicura, affidabile e accurata non può essere raggiunta solo da un singolo prodotto o tecnologia.
In questa fase, i modelli di autopilota L3 vengono prodotti in serie e messi in vendita, il che apre davvero le porte all'autopilota di fascia alta. Che si tratti di case automobilistiche, produttori di sensori o giganti della tecnologia, tutti credono che solo applicando la fusione dei sensori possano soddisfare le esigenze di percezione dei veicoli autonomi di fascia alta.
Oggi Xiaohui porterà tutti a dare un'occhiata a quale soluzione di fusione di sensori è la scelta migliore per la guida autonoma!
Per ottenere una percezione precisa, non puoi fare affidamento sul "combattimento singolo"
L'importanza dei sensori per le auto a guida autonoma non ha bisogno di essere ripetuta. Tra i tre elementi principali della guida autonoma, la percezione è la base per il processo decisionale e l'esecuzione, ed è anche il pezzo più critico del puzzle nel processo di guida autonoma nel pieno senso della realizzazione.
Tuttavia, la realizzazione di una percezione sicura, affidabile e accurata non può essere raggiunta solo da un certo tipo di sensore. Poiché il cosiddetto "a volte un piede può rivelarsi corto mentre un pollice può rivelarsi lungo", gli attuali sensori tradizionali non sono i "guerrieri esagonali" che sono pienamente in grado di svolgere compiti di rilevamento autonomo dei veicoli da soli.
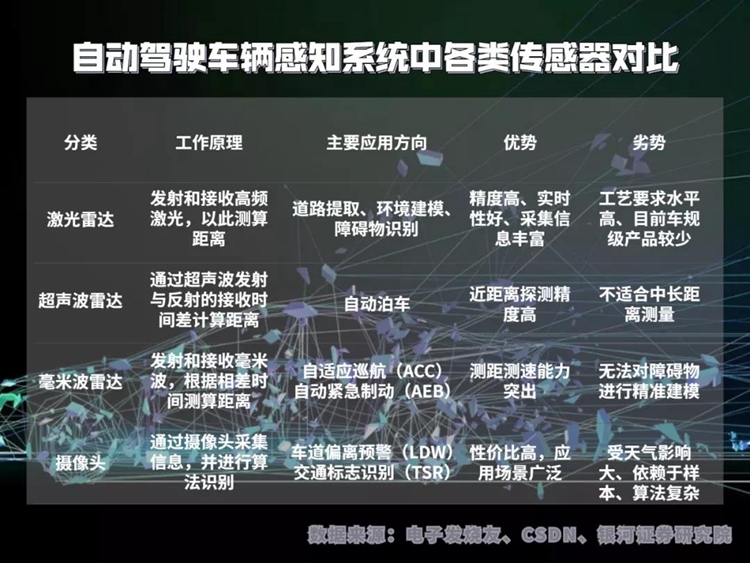
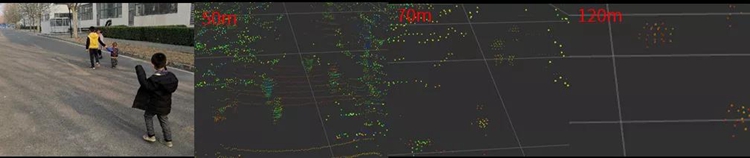
Lidarpresenta vantaggi eccezionali come elevata precisione, misurazione a lungo raggio, buone prestazioni in tempo reale e ricca raccolta di informazioni. Negli ultimi anni ha fatto grandi progressi anche nel cablaggio, nella miniaturizzazione, nel rispetto delle normative sui veicoli e nel controllo dei costi. Tuttavia, quando si rilevano oggetti distanti, le informazioni sulla posizione ottenute dal lidar sono spesso scarse. Basandosi sulla differenza di riflettività laser ad alta frequenza per distinguere gli ostacoli dai materiali, è leggermente insufficiente nel complesso ambiente di guida reale.
La tecnologia radar a onde millimetriche è matura, ma poiché l'onda millimetrica è significativamente influenzata dall'attenuazione e dall'assorbimento dell'atmosfera, il radar a onde millimetriche non è in grado di eseguire una modellazione accurata e continua degli ostacoli nel processo dinamico di guida del veicolo.
Sebbene anche la tecnologia della fotocamera sia molto matura e abbia un'alta risoluzione, ha un campo visivo limitato e può concentrarsi solo su un campo visivo limitato. Inoltre, i dati o le immagini che ottiene sono bidimensionali, senza informazioni sul valore di profondità e non possono riflettere con precisione la distanza relativa di diversi oggetti all'interno del campo di rilevamento.

La fotocamera può mettere a fuoco solo su un campo visivo limitato
La precisione del rilevamento del radar a ultrasuoni è estremamente elevata, la distanza di rilevamento è molto breve e la trasmissione e la ricezione delle onde ultrasoniche sono più sensibili alle condizioni meteorologiche rispetto alle onde millimetriche. In un ambiente ad alta velocità, l'errore di portata degli ultrasuoni aumenterà a causa della bassa velocità del mezzo di rilevamento.
Sebbene ci siano anche "fondamentalisti" come Tesla, che aderiscono sempre alla linea della pura percezione visiva. Ma nel complesso, le soluzioni che integrano diversi tipi di sensori sono le più popolari nel settore della guida autonoma.
La "risposta standard" per la fusione dei sensori
Tuttavia, è anche abbastanza difficile implementare applicazioni di fusione per diversi tipi di sensori. Alcuni sensori sono intrinsecamente difficili da fondere e alcune fusioni tra sensori non valgono la pena.
Ad esempio, tra sensori lidar e ultrasonici e radar a onde millimetriche, sebbene rilevino media diversi, i loro principi di funzionamento sono simili e il lidar è di gran lunga superiore agli altri due sensori in termini di prestazioni di rilevamento.
Prendi C-Fans-256, il primo lidar a stato solido a 256 linee al mondo rilasciato ufficialmente daSurestarnon molto tempo fa: i prodotti della serie C-Fans sono i primi lidar domestici montati frontalmente con un design completo del calibro per auto come serie. L'ultimo prodotto in Cina, C-Fans-256 ha una risoluzione di 0,1°x0,1°. Con il suo campo visivo di scansione omnidirezionale, può facilmente realizzare il monitoraggio di aree su larga scala ea lunga distanza e veicoli autonomi come girare a sinistra senza protezione Fornire un ampio campo visivo in scene difficili, in modo da prendersi cura dei veicoli o pedoni sulla destra.
Il primo 256- al mondotravelidar a stato solido di livello automobilistico C-Fans-256
L'altissimo frame rate del livello della telecamera sportiva conferisce a questo lidar un potente campo visivo e la capacità di catturare eventi anomali, sia che si tratti di rilevare ostacoli o sonde fantasma, fusione ad alta velocità nella strada principale, improvvisi ad alta velocità scene difficili di frenata e guida automatica. Ha una buona prestazione sottostante, che è più adatta per un ambiente di guida reale ad alta velocità, dinamico e complesso.
Al momento, il lidar evoluto è stato ampiamente riconosciuto come il sensore essenziale fondamentale nella guida autonoma con le sue prestazioni complete ed eccezionali. Se i tre sono fusi insieme, è probabile che il risultato che otteniamo sia "1+1+1=1", che non può riflettere i vantaggi dei sensori a ultrasuoni e dei radar a onde millimetriche.
Sebbene il radar a onde millimetriche possa compensare efficacemente il problema che i dati originali raccolti dalla telecamera non hanno informazioni sul valore di profondità, la risoluzione del bersaglio del radar a onde millimetriche è molto bassa e le dimensioni e il contorno del bersaglio non possono nemmeno essere determinati in alcuni scenari. Vedi "domanda. Ciò rende impossibile ottenere un'integrazione di basso livello e approfondita tra i due, e più spesso possono essere utilizzati solo sotto forma di "integrazione semplificata" per risolvere alcuni problemi di misurazione della velocità target o di tracciamento della traiettoria.
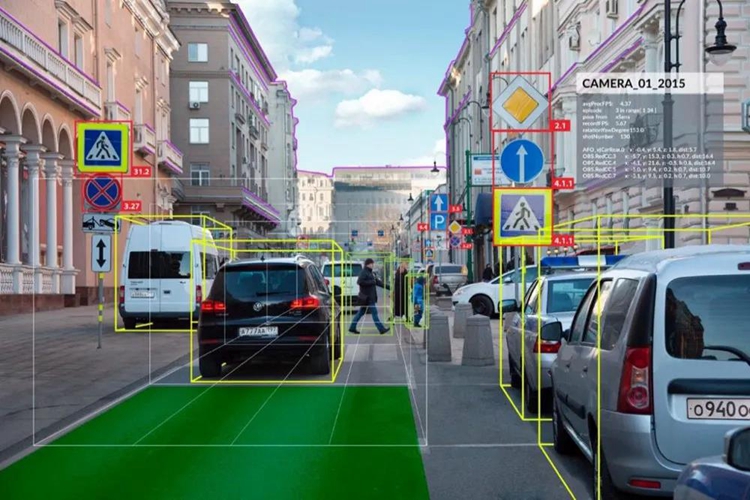
Che si tratti della stragrande maggioranza dei modelli di autopilota L3 attualmente sul mercato o delle soluzioni di autopilota di livello superiore che sono state rilasciate, hanno scelto una soluzione di percezione basata su "lidar + fotocamera" e assistito da altri sensori ambientali.
Un attuale schema di fusione "lidar + fotocamera" mainstream
Perché tra tutti i tipi di sensori, che si tratti di case automobilistiche o giganti della tecnologia, concentrano tutti la loro attenzione su lidar e telecamere?
In generale, è perché i due possono essere ben integrati per raggiungere l'obiettivo finale di "imparare dai reciproci punti di forza", in modo che il sistema di guida autonoma possa effettivamente prendere il "lungo" e compensare tutti i "corti". Può essere definita la "risposta standard" per la fusione dei sensori nei sistemi di percezione della guida autonoma.
Lidar + Fotocamera = Futuro
Lidar è salutato come "l'occhio della guida autonoma" dall'industria. Solo in termini di prestazioni di percezione, è il miglior sensore di tutti i tipi richiesti da un sistema di guida autonomo. Il lidar emette e riceve laser ad alta frequenza per ottenere informazioni sulla posizione, che gli consentono di ottenere una precisione di portata estremamente elevata e resistenza alle interferenze ambientali. Rispetto ad altri sensori 3D, la gamma di lidar presenta evidenti vantaggi.
Lidar ha eccellenti capacità di rilevamento
Il lidar C-Fans-256 a stato solido ad altissima risoluzione a livello di immagine sviluppato daSurestarpuò acquisire con precisione la posizione e le informazioni sui punti di veicoli e pedoni a una distanza di 200 m e può identificare con precisione ostacoli cubici con una lunghezza laterale di 20 cm. Anche la distanza effettiva è fino a quasi 60 m.
C-Fans-256 raggiunge anche un consumo energetico inferiore a 16 W e ha un'elevata conformità alla conformità del veicolo con un totale di 31 test in 9 categorie di ISO16750 e può funzionare stabilmente e normalmente in ambienti difficili come freddo intenso e caldo, alta temperatura e umidità, urti irregolari, ecc. Inoltre, un altro prodotto della stessa serie, C-Fans-32, è attualmente l'unico prodotto lidar che ha superato la certificazione "a sicurezza intrinseca".
Essendo un sensore di immagine che esiste da molto tempo, la fotocamera ha un costo relativamente basso. Non solo la relativa catena industriale, ma anche la fotocamera è molto matura nella tecnologia. Inoltre, la fotocamera ha un'alta risoluzione e la stima delle informazioni sulla profondità densa a lunga distanza può essere ottenuta tramite l'elaborazione dell'algoritmo.
Applicazione della fotocamera in auto senza conducente
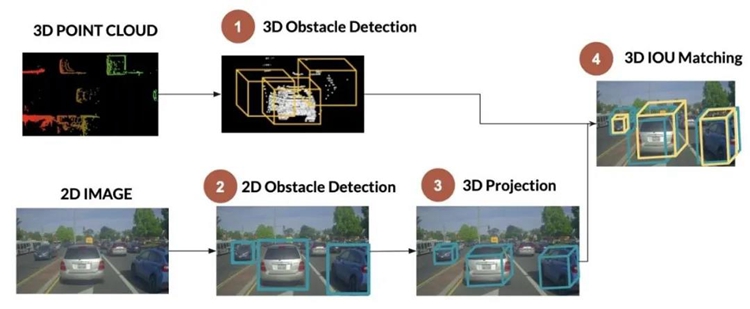
Con la premessa di completare la calibrazione e la sincronizzazione del lidar e della fotocamera, la nuvola di punti del lidar può essere calibrata e proiettata sul piano dell'immagine della fotocamera per formare una mappa di profondità relativamente scarsa ma molto accurata. In combinazione con i risultati dell'elaborazione dell'algoritmo dell'immagine, il sistema di percezione della guida autonoma è possibile ottenere dati di informazioni sulla profondità accurati e densi quasi senza vicoli ciechi, in modo da realizzare la comprensione accurata della distanza relativa, del profilo di posizione e della velocità di movimento degli ostacoli in un ampio raggio di rilevamento.
Per il lidar, la fotocamera non solo può attenuare l'influenza della nuvola di punti locale leggermente rada durante il rilevamento di bersagli a lunga distanza, ma anche migliorare la risoluzione di diversi ostacoli con lo stesso materiale e posizioni simili attraverso la scena reale ad alta risoluzione della fotocamera Immagine.
L'esistenza del lidar migliora notevolmente il problema della scarsa accuratezza della stima della profondità della fotocamera come sensore di rilevamento passivo e migliora significativamente la stabilità e la robustezza dell'intero sistema di rilevamento. La "reazione chimica" prodotta dalla combinazione dei due consente alle prestazioni del sistema di percezione della guida autonoma di evolversi e raggiungere una vera percezione precisa.

Fusione Lidar + fotocamera (fonte dati: set di dati KITTI)
Sebbene ci siano molti problemi in attesa che le persone esplorino scoperte sulla strada dell'applicazione di lidar e fusione di fotocamere, come "come proiettare meglio la nuvola di punti sull'immagine", "come garantire che la corrispondenza sia vera ed efficace " e "l'accuratezza del tracciamento delle funzionalità" Come migliorare ulteriormente" e così via.
Tuttavia, poiché le auto a guida autonoma L3 sono sul mercato una dopo l'altra, oggi, mentre la pista lidar continua a prendere fuoco, non solo le case automobilistiche, ma i produttori veterani di lidar comeSurestar, che sono stati profondamente coinvolti nella ricerca e nello sviluppo del prodotto per più di dieci anni, hanno anche iniziato un'approfondita esplorazione dell'integrazione di lidar e fotocamere. Credo che non ci vorrà molto per la "perfetta integrazione" di LiDAR e fotocamera per diventare una realtà. Avviciniamoci a un nuovo futuro in cui la guida autonoma è matura e popolare. (www.isurestar.net)