
Lorsque Tesla a souligné les défauts fonctionnels du logiciel FSD, il a mentionné certains cas particuliers, tels que : "Objets statiques, tels que les débris de la route, les véhicules d'urgence, les zones de construction, les intersections complexes, les obstructions, les conditions météorologiques défavorables et le trafic dense. , Sondes fantômes , motos qui ne respectent pas le code de la route, etc.
Ces problèmes, du point de vue de la R&D, sont divers besoins ou bogues non résolus, mais du point de vue des consommateurs, ces problèmes signifient que le logiciel FSD est extrêmement dangereux.
Ces problèmes peuvent tous être résolus avecLidar. PriseSurestarPour les produits de la série C-Fans de par exemple, ces facteurs ont été pris en compte au début de la conception.
1.Haute résolution (0,1°×0,1°)

Dans le processus de conduite sur autoroute urbaine, les piétons qui ne respectent pas les règles de circulation au loin et les véhicules reculant accidentellement sur les autoroutes, haute résolutionLidarpeut résoudre les différents problèmes rencontrés par les radars à ondes millimétriques actuels et la détection par reconnaissance vidéo. Le système de planification de décision fournit une entrée sensorielle stable. Bien que les données lidar en temps réel soient un nuage de points clairsemé, la ligne C-Fans256 avec sa résolution ultra-haute de 0,1° × 0,1° peut toujours atteindre une densité de grille de 0,4 m × 0,4 m à une distance de 200 m. Pour une voiture d'une largeur de 1,8 m. Pour un SUV ordinaire d'une hauteur de 1,8 m, une matrice de points 4 × 4 peut encore être vue à 200 m.
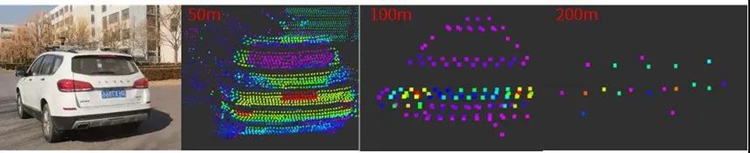
Figure 1 Nuage de points mesuré par le véhicule C-Fans256
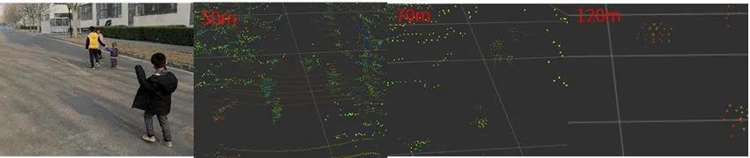
Figure 2 C-Fans256 nuage de points mesuré pour les enfants (hauteur et 1,1 m)

Figure 3 Nuage de points mesuré par C-Fans256 pour les petits obstacles (20 cm × 20 cm × 20 cm)
La haute résolution correspond à une densité de grille élevée, qui peut réaliser une détection d'obstacles plus éloignée et plus petite. Dans des conditions routières urbaines complexes, vous pouvez trouver des détails éloignés dès que possible. En conduite à grande vitesse, vous pouvez détecter à l'avance le mouvement ou l'anomalie de véhicules éloignés. , Cette capacité de détection signifie une plus grande sécurité.
2. Grand champ de vision (150°×30°)
Virage à gauche non protégé aux intersections et scènes d'intersection complexes dans les zones urbaines, un grand champ de vision peut apporter des informations de perception riches aux véhicules autonomes, en particulier lors de l'exécution de mouvements de demi-tour, plus le champ de vision est grand, mieux c'est, fourni par C-Fans256 Avec un champ de vision de 150° × 30°, il peut fournir une large plage de détection lorsque le véhicule tourne à gauche ou fait demi-tour, et améliore la sécurité du système de conduite automatique.
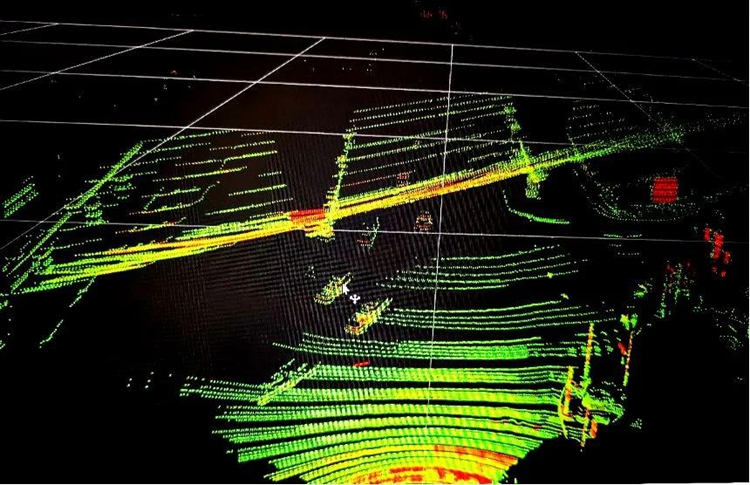
Figure 4 Nuage de points C-Fans256
3. Fréquence d'images élevée (80 Hz)
En cas d'urgence, de fusion à grande vitesse avec la route principale, de freinage soudain à grande vitesse et d'autres scénarios, la capacité de mesure de contour directe précise et rapide du lidar peut aider les véhicules autonomes à réagir dans les 100 millisecondes. L'indicateur clé à ce moment est la fréquence d'images. Si la sonde fantôme ou une voiture qui freine subitement brusquement, la vitesse relative est de 80km/h. Si la fréquence d'images du radar est de 10 Hz, l'algorithme de suivi a terminé le calcul en 5 images, ce qui signifie que la distance de réponse du véhicule est :
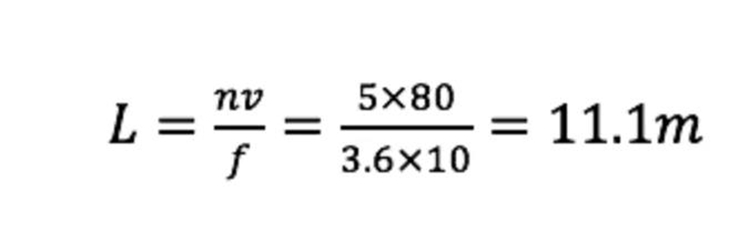
À partir du moment où l'accident s'est produit jusqu'au moment où le système a commencé à porter un jugement, la distance relative entre les deux a été réduite de 11,1 m, puis la distance de freinage du véhicule a été incluse, ce qui signifie évidemment une augmentation du facteur de risque.

Figure 5 Distance de réponse du véhicule à différentes fréquences d'images (80 km/h)
C'est l'une des principales raisons pour lesquelles la plupart des véhicules autonomes fonctionnent dans des scénarios de vitesse faible à moyenne et de faible dynamique à ce stade. Afin d'améliorer autant que possible la capacité de perception du système de conduite autonome, C-Fans256 a augmenté sa fréquence d'images au niveau de 80 Hz sans précédent dans l'industrie, dans l'espoir de contribuer sa force à la réalisation de la conduite sans pilote dans des environnements à grande vitesse et hautement dynamiques et complexes.
La fréquence d'images élevée de 80 Hz apporte une détection dynamique fluide et rapide. Dans un environnement de trafic réel, le temps de détection dynamique des véhicules sans pilote peut être raccourci de l'ordre de centaines de millisecondes à l'ordre de dix millisecondes, apportant ainsi une sécurité accrue.
4. Reconnaissance des niveaux de gris

Figure 8 Effet de reconnaissance des lignes de voie la nuit
La bibliothèque de scènes L2 doit être un sous-ensemble de la bibliothèque de scènes L3, comme l'assistance au centrage de voie LCC, l'assistance au changement de voie automatique ALC, la croisière adaptative à pleine vitesse ACC, la croisière adaptative en courbe ATC, le départ de voie LDW, etc. L'utilisation du lidar peut améliorer la conduite automatique Robustesse du système de nuit, entrées et sorties de tunnel, etc.
Ces scènes reposent principalement sur la détection précise par le capteur des lignes de voie et des accotements de la route, ce qui met en avant des exigences pour le niveau de reconnaissance des niveaux de gris du lidar, qui nécessite une reconnaissance précise et précise des niveaux de gris.
C-Fans-256 fournit une résolution en niveaux de gris de 8 bits, qui peut réaliser une reconnaissance claire des lignes de voie par tous les temps et améliorer la capacité de perception nocturne du système de conduite sans pilote. (www.isurestar.net)