
Cuando Tesla enfatizó los defectos funcionales del software FSD, mencionó algunos casos de esquina, tales como: "Objetos estáticos, como escombros en la carretera, vehículos de emergencia, áreas de construcción, intersecciones complejas, obstrucciones, clima adverso y tráfico denso". , motos que no siguen las normas de circulación, etc.
Estos problemas, desde la perspectiva de I+D, son varias necesidades o errores no resueltos, pero desde la perspectiva de los consumidores, estos problemas significan que el software FSD es extremadamente peligroso.
Todos estos problemas se pueden resolver conLIDAR. Tomandoestrella seguraComo ejemplo de los productos de la serie C-Fans, estos factores se consideraron al comienzo del diseño.
1.Alta resolución (0,1°×0,1°)

En el proceso de conducción en carreteras urbanas, peatones que no siguen las normas de tráfico en la distancia y vehículos que retroceden accidentalmente en las carreteras, alta resoluciónLIDARpuede resolver los diversos problemas encontrados por el radar de ondas milimétricas actual y la detección de reconocimiento de video. El sistema de planificación de decisiones proporciona información sensorial estable. Aunque los datos LIDAR en tiempo real son una nube de puntos dispersa, la línea C-Fans256 con su resolución ultra alta de 0,1°×0,1° aún puede lograr una densidad de cuadrícula de 0,4 mx 0,4 m a una distancia de 200 m. Para un coche con un ancho de 1,8 m. Para un SUV ordinario con una altura de 1,8 m, todavía se puede ver una matriz de puntos de 4×4 a 200 m.
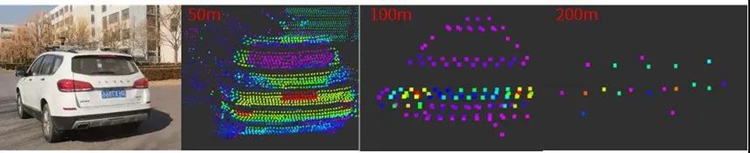
Figura 1 Nube de puntos medida del vehículo C-Fans256
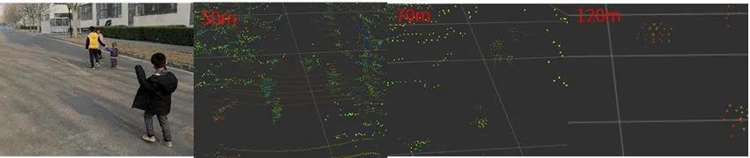
Figura 2 Nube de puntos medida por C-Fans256 para niños (altura y 1,1 m)

Figura 3 Nube de puntos medida por C-Fans256 para obstáculos pequeños (20 cm × 20 cm × 20 cm)
La alta resolución corresponde a una alta densidad de cuadrícula, que puede realizar una detección de obstáculos más lejana y pequeña. En condiciones complejas de carreteras urbanas, puede encontrar detalles distantes lo antes posible. Bajo la conducción a alta velocidad, puede detectar el movimiento o la anomalía de los vehículos distantes por adelantado. , Esta capacidad de detección significa mayor seguridad.
2. Gran campo de visión (150°×30°)
Giro a la izquierda sin protección en intersecciones y escenas de intersecciones complejas en áreas urbanas, el FOV grande puede brindar información de percepción rica a los vehículos autónomos, especialmente al completar movimientos de giro en U, cuanto mayor sea el campo de visión requerido, mejor, proporcionado por C-Fans256 Con un FOV de 150°×30°, puede proporcionar un amplio rango de detección cuando el vehículo gira a la izquierda o en U, y mejora la seguridad del sistema de conducción automática.
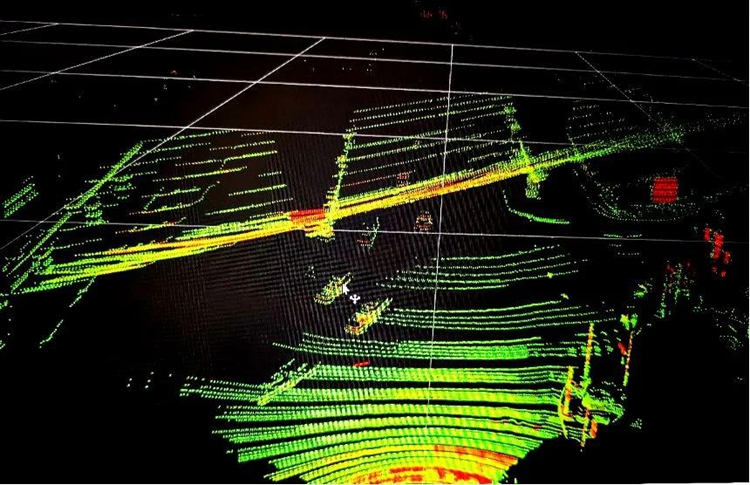
Figura 4 Nube de puntos C-Fans256
3. Alta velocidad de fotogramas (80 Hz)
En emergencias, la incorporación a alta velocidad a la carretera principal, el frenado repentino a alta velocidad y otros escenarios, la capacidad de medición de contorno directa precisa y rápida de lidar puede ayudar a los vehículos autónomos a responder en 100 milisegundos. El indicador clave en este momento es la velocidad de fotogramas. Si la sonda fantasma o un coche que frena de repente, la velocidad relativa es de 80 km/h. Si la velocidad de fotogramas del radar es de 10 Hz, el algoritmo de seguimiento ha completado el cálculo en 5 fotogramas, lo que significa que la distancia de respuesta del vehículo es:
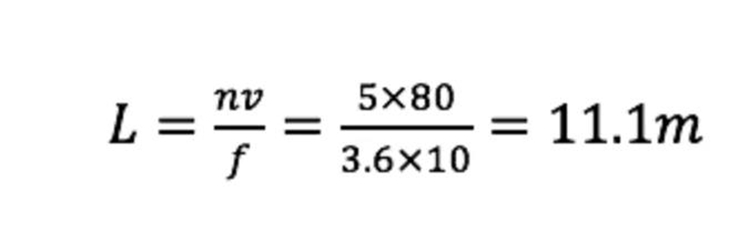
Desde que ocurrió el accidente hasta que el sistema comenzó a emitir un juicio, la distancia relativa entre ambos se redujo en 11,1 m, y luego se incluyó la distancia de frenado del vehículo, lo que obviamente significa un aumento en el factor de riesgo.

Figura 5 Distancia de respuesta del vehículo bajo diferentes frecuencias de imagen (80 km/h)
Esta es una de las principales razones por las que la mayoría de los vehículos autónomos operan en escenarios de velocidad baja a media y baja dinámica en esta etapa. Para mejorar la capacidad de percepción del sistema de conducción autónoma tanto como sea posible, C-Fans256 ha aumentado su velocidad de cuadros al nivel de 80 Hz sin precedentes en la industria, con la esperanza de contribuir con su fuerza a la realización de la conducción no tripulada en entornos complejos y de alta velocidad y alta dinámica.
La alta velocidad de fotogramas de 80 Hz brinda una detección dinámica suave y rápida. En un entorno de tráfico real, el tiempo de detección dinámica de vehículos no tripulados se puede acortar del orden de cientos de milisegundos al orden de diez milisegundos, lo que brinda una mayor seguridad.
4. Reconocimiento de escala de grises

Figura 8 Efecto de reconocimiento de línea de carril por la noche
La biblioteca de escenas L2 debe ser un subconjunto de la biblioteca de escenas L3, como la asistencia de centrado de carril LCC, la asistencia de cambio de carril automático ALC, el crucero adaptativo de velocidad máxima ACC, el crucero de curva adaptativo ATC, la salida de carril LDW, etc. El uso de lidar puede potenciar la conducción automática Robustez del sistema por la noche, entradas y salidas de túneles, etc.
Estas escenas se basan principalmente en la detección precisa del sensor de líneas de carril y arcenes de carreteras, lo que plantea requisitos para el nivel de reconocimiento de escala de grises de lidar, que requiere un reconocimiento de escala de grises preciso y preciso.
C-Fans-256 proporciona una resolución de escala de grises de 8 bits, que puede realizar un reconocimiento claro de la línea de carril en todo clima y mejorar la capacidad de percepción nocturna del sistema de conducción no tripulado.(www.isurestar.net)