
Introdução do equipamento
OGenius mini UAV LiDARsistemaé um sistema LiDAR de nível de mapeamento e levantamento econômico desenvolvido independentemente pela SureStar. Ele integra o scanner a laser multilinha R-Fans, sistema de medição de navegação inercial (GNSS/IMU), unidade de controle de computador, etc., e pode ser operado simplesmente por uma pessoa com alta integração, peso leve e alta precisão de dados.
O design altamente integrado do Genius mini UAV LiDAR faz com que todo o sistema tenha melhor desempenho e estabilidade, e pode adquirir informações espaciais 3D e imagens da superfície do terreno em tempo real e rapidamente, e é amplamente utilizado no campo da medição 3D ágil e eficienteárea.

Figura 1 Sistema de digitalização Genius mini UAV LiDAR
parâmetros principais
● Alcance máximo: 200m@20% de refletividade, 250m@80% de refletividade;
●Altura típica de voo: 50 ~ 150 m;
●Frequência do ponto de varredura: 320.000 pontos por segundo para 16 linhas, 640.000 pontos por segundo para 32 linhas;
●Precisão de medição plana relativa/absoluta: <0,10m/0,15m;
●Campo de visão de digitalização: 360°*30°;
●Precisão da posição: plano 0,02m, elevação 0,05m;
●Precisão de atitude: pitch/roll: 0,025 graus, rumo: 0,08 graus;
●Resolução da imagem: 24 milhões de pixels/42 milhões de pixels (opcional);
●Peso do sistema: 1,056kg (sem câmera);
●Densidade de ponto: 16 linhas é melhor que 100pts/m², 32 linhas é melhor que 200pts/m²;
●Precisão: a precisão da elevação é superior a 10 cm, a precisão do plano é superior a 10-15 cm;
●Armazenamento de dados: disco U conectável;
Implementação de trabalho de campo
A área de pesquisa está localizada em uma área montanhosa no sudoeste. Para controlar o fluxo de detritos na área montanhosa, a unidade responsável construiu a barragem de Guyu no topo da montanha. A barragem de Guyu, construída há muito tempo, foi preenchida com sedimentos. A barragem de Guyu precisa ser construída novamente para controlar o fluxo de detritos, e o DEM superior precisa ser obtido para calcular a quantidade de terraplenagem para facilitar o projeto da barragem de contenção no estágio posterior.
Planejamento de rota
A área de pesquisa é estreita e longa. Para obter toda a área de levantamento, o intervalo de rota predefinido é de 40m e a altura é de 80m. A queda da montanha é muito grande para a segurança do vôo. Antes da operação oficial, o Elf UAV é usado para verificar a rota. Está previsto o uso de 2 surtidas, o comprimento total de cerca de 10 km.

Figura 2 Âmbito da área de levantamento
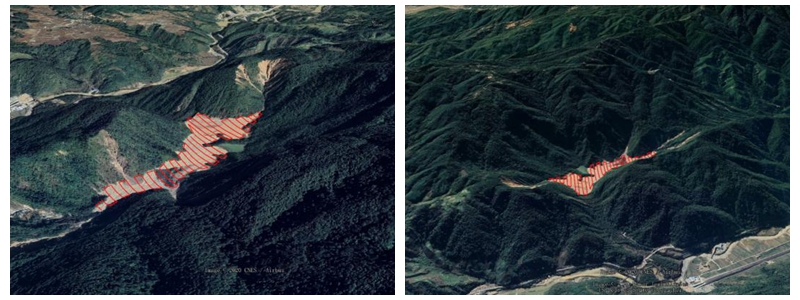
Figura 3 A tendência das montanhas circundantes na área de pesquisa

Figura 4 Posição de rota predefinida
Montagem da estação base
Antes da operação oficial, precisamos configurar uma estação base GPS para coletar dados estáticos e realizar observação síncrona do GPS terrestre e do sistema GPS do LiDAR. Após a missão de voo, os dados da estação base e os dados observados pelo sistema GPS do radar são posteriormente eliminados pelo cálculo de fusão pós-diferença para obter uma nuvem de pontos de alta precisão.

Figura 5 Montagem da estação base
Coleta de ponto de verificação
Enquanto o equipamento estiver montado no UAV, comece a dispor e coletar os pontos de controle de fase e pontos de verificação de elevação.

Figura 6 Coleção de pontos de controle de fase e pontos de verificação
pré-processamento de dados
Use o software POSPac para executar o cálculo pós-diferença para resolver a trajetória, use nosso software de resolução de nuvem de pontos SS-Lipre para resolver a nuvem de pontos e visualizá-la em combinação com os dados da trajetória e remover ruídos da nuvem de pontos após verificar se a nuvem de pontos é corrigir, remover pontos voadores e ruído do sol, etc.

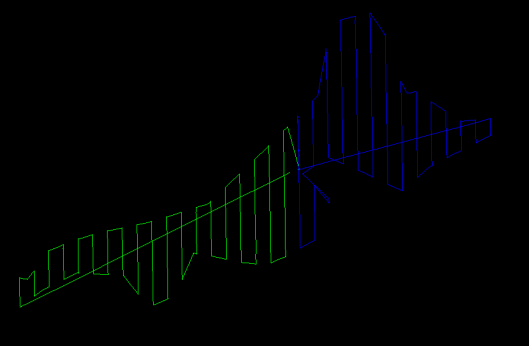
Figura 7 Rota predefinida e rota de voo real
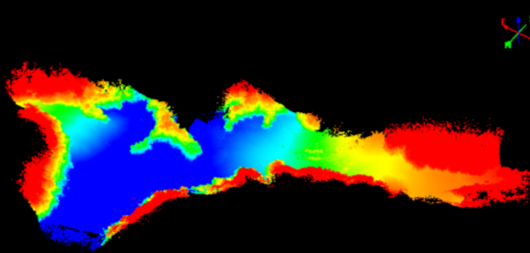
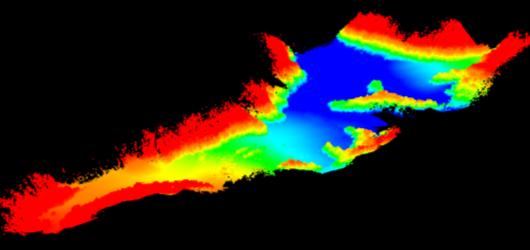
Figura 8 Dados brutos da nuvem de pontos
pós-processamento de dados
As nuvens de pontos foram classificadas usando macros de edição do software Terrasolid.
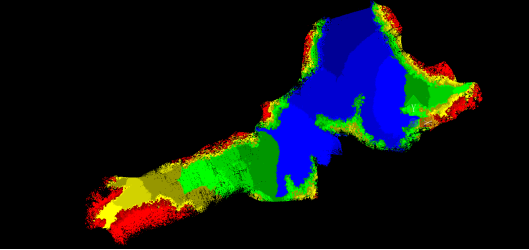
Figura 9 Nuvem de pontos original

Figura 10 Nuvem de pontos classificados
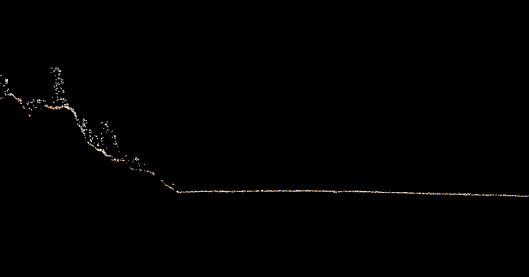
Figura 11 Captura de tela da nuvem de pontos classificados
Processamento de ortofoto e nuvem de pontos coloridos
A imagem coletada é combinada com a foto para fazer uma imagem POS de acordo com as informações de exposição, e a ortofoto é produzida combinando os pontos de controle de fase com o software de processamento de imagem.
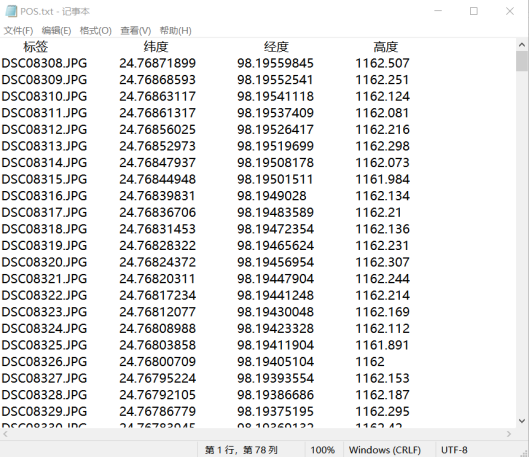
Figura 12 Imagem de dados de POS
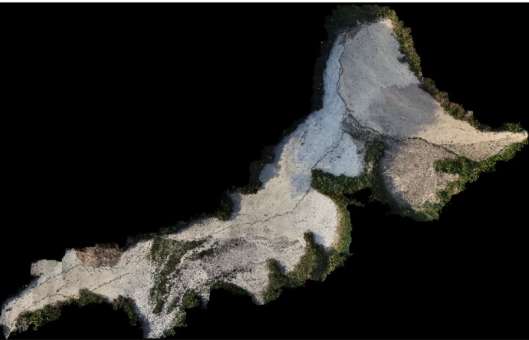
Figura 13 Ortofoto Digital DOM
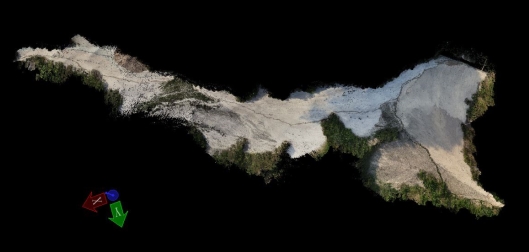
Figura 14 Nuvem de pontos coloridos
Processamento de desenho de linha (DLG)
De acordo com as informações coletadas da nuvem de pontos, os pontos de solo são obtidos após a classificação e o DEM é feito. Com o suporte de software de terceiros, como o software Coal Aviation 2D e 3D, Terrasolid e Southern Cass, o DEM pode processar o desenho de linha (DLG) que desejamos.
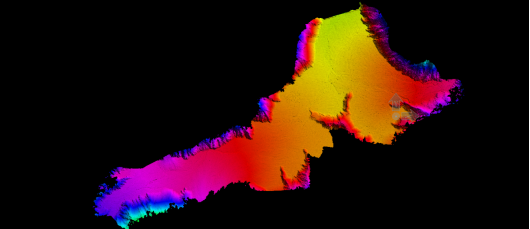
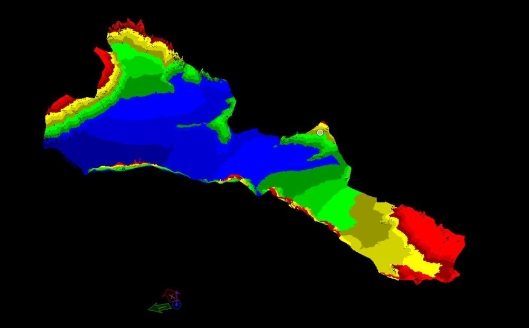
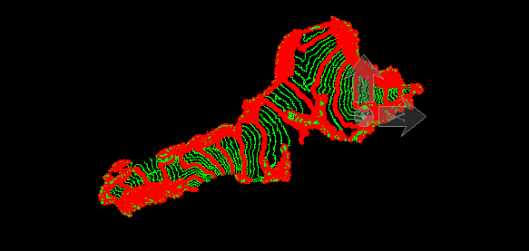
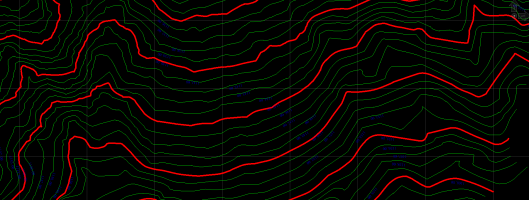
Figura 16 Desenho de linha digital
verificação de precisão
O software compara os dados da nuvem de pontos próximos ao ponto de verificação e gera a tabela de comparação de precisão do ponto de verificação.
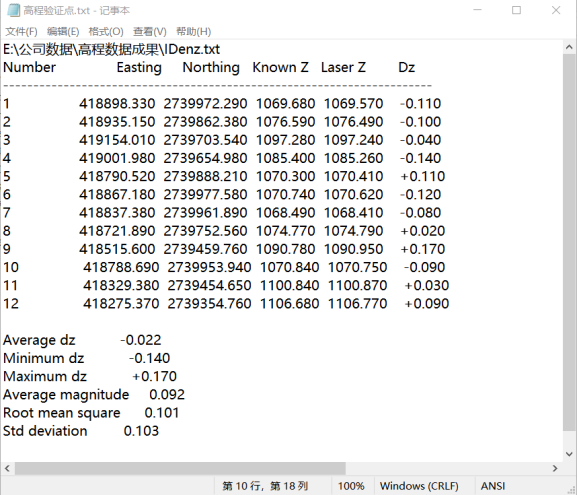
Figura (18) Verificação da Precisão da Elevação
Após a inspeção, o resultado final apresenta um erro de elevação média de 10,1 cm, o que atende ao requisito do cliente para erro de elevação média.
Resumo do projeto
Ao usar o sistema Genius UAV LiDAR para este mapeamento de terreno 1:1000, as vantagens do sistema lidar aerotransportado Genius em comparação com outros métodos tradicionais são as seguintes:
(1) Operação conveniente e flexível, adequada para levantamento e mapeamento de áreas de levantamento irregulares de pequena escala, como planícies e áreas montanhosas;
(2) É leve e pode ser equipado com pequenos UAVs DJI M210/300 para operações de longa distância, e a operação individual é forte, para que atividades de campo complexas possam ser resolvidas de forma não tripulada;
(3). A densidade de pontos extremamente alta por metro quadrado garante a qualidade dos dados;
(4). Alta precisão de elevação, pode atender o efeito de precisão de elevação melhor que 10 cm sem controle, adequado para pesquisa de engenharia de alta precisão;
(5). Seu modo de eco duplo pode obter dados de coordenadas de terreno de alta precisão através da vegetação;
(6). O equipamento lidar autodesenvolvido doméstico tem forte desempenho, garantia de equipe pós-venda oportuna e eficaz, para que os clientes possam pagar e usá-lo bem.