
Als Tesla die Funktionsmängel der FSD-Software betonte, erwähnte es einige Eckfälle, wie etwa: „Statische Objekte, wie Straßenschutt, Einsatzfahrzeuge, Baustellen, komplexe Kreuzungen, jegliche Hindernisse, schlechtes Wetter und dichter Verkehr“, so Ghost , Motorräder, die sich nicht an die Straßenverkehrsordnung halten usw.
Diese Probleme sind aus Sicht der Forschung und Entwicklung verschiedene ungelöste Bedürfnisse oder Fehler, aber aus der Sicht der Verbraucher bedeuten diese Probleme, dass FSD-Software extrem gefährlich ist.
Diese Probleme können alle mit gelöst werdenLidar. NehmenSurestar's Produkte der C-Fans-Serie wurden diese Faktoren zu Beginn des Designs berücksichtigt.
1.Hohe Auflösung (0,1°×0,1°)

Bei innerstädtischen Autobahnfahrten werden Fußgänger, die sich in der Ferne nicht an die Verkehrsregeln halten, und versehentlich rückwärts fahrende Fahrzeuge auf Autobahnen hochauflösend dargestelltLidarkann die verschiedenen Probleme lösen, die bei der derzeitigen Millimeterwellenradar- und Videoerkennungserkennung auftreten. Das Entscheidungsplanungssystem liefert stabile sensorische Eingaben. Obwohl die Echtzeit-Lidar-Daten eine spärliche Punktwolke sind, kann die C-Fans256-Linie mit ihrer ultrahohen Auflösung von 0,1°×0,1° immer noch eine Rasterdichte von 0,4m×0,4m in einer Entfernung von 200m erreichen. Für ein Auto mit einer Breite von 1,8 m. Bei einem gewöhnlichen SUV mit einer Höhe von 1,8 m ist auf 200 m noch eine 4×4-Punktmatrix zu sehen.
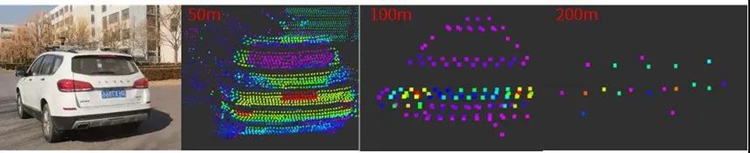
Abbildung 1 C-Fans256 Fahrzeug gemessene Punktwolke
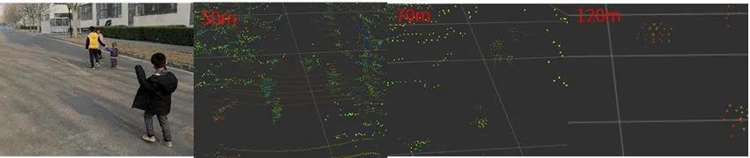
Abbildung 2 C-Fans256 gemessene Punktwolke für Kinder (Höhe & 1,1 m)

Abbildung 3 C-Fans256 gemessene Punktwolke für kleine Hindernisse (20cm×20cm×20cm)
Eine hohe Auflösung entspricht einer hohen Gitterdichte, wodurch eine weiter entfernte und kleinere Hinderniserkennung realisiert werden kann. Unter komplexen städtischen Straßenverhältnissen können Sie entfernte Details so schnell wie möglich finden. Beim Hochgeschwindigkeitsfahren können Sie die Bewegung oder Anomalie entfernter Fahrzeuge im Voraus erkennen. , Diese Erkennungsfähigkeit bedeutet höhere Sicherheit.
2. Großes Sichtfeld (150°×30°)
Beim ungeschützten Linksabbiegen an Kreuzungen und komplexen Kreuzungsszenen in städtischen Gebieten kann ein großes FOV autonome Fahrzeuge mit reichhaltigen Wahrnehmungsinformationen versorgen, insbesondere bei der Vollendung von Wendebewegungen, je größer das Sichtfeld erforderlich ist, desto besser, bereitgestellt von C-Fans256 Mit Mit einem FOV von 150°×30° kann es einen großen Erfassungsbereich bieten, wenn das Fahrzeug nach links oder bei einer Kehrtwende abbiegt, und die Sicherheit des automatischen Fahrsystems verbessern.
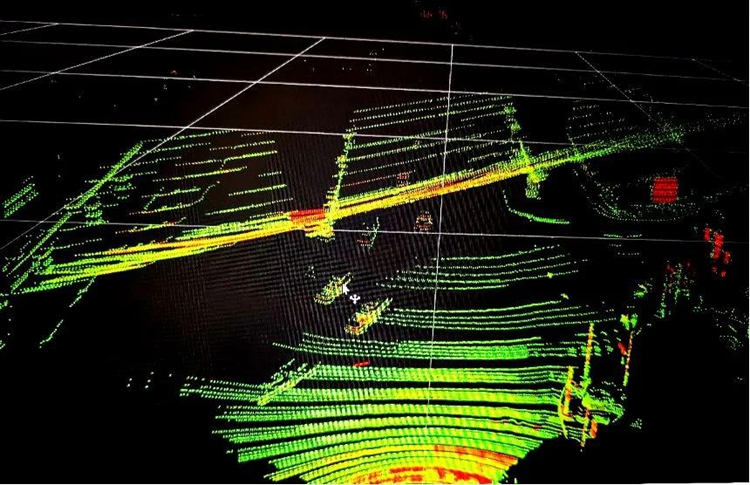
Abbildung 4 C-Fans256-Punktwolke
3. Hohe Bildrate (80 Hz)
In Notfällen, beim Hochgeschwindigkeits-Einfädeln auf die Hauptstraße, beim plötzlichen Bremsen bei hoher Geschwindigkeit und in anderen Szenarien kann die präzise und schnelle Fähigkeit von Lidar zur direkten Konturmessung autonomen Fahrzeugen helfen, innerhalb von 100 Millisekunden zu reagieren. Der Schlüsselindikator zu diesem Zeitpunkt ist die Bildrate. Wenn die Geistersonde oder ein Auto plötzlich bremst, beträgt die Relativgeschwindigkeit 80 km/h. Wenn die Radarbildrate 10 Hz beträgt, hat der Verfolgungsalgorithmus die Berechnung in 5 Bildern abgeschlossen, was bedeutet, dass die Reaktionsentfernung des Fahrzeugs ist:
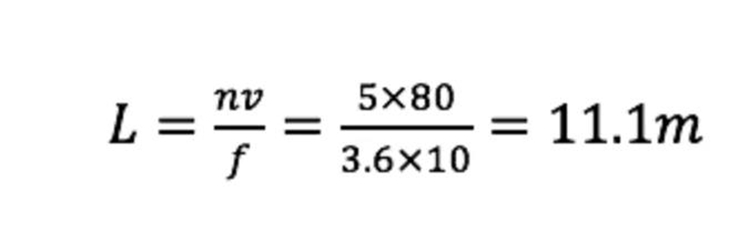
Vom Zeitpunkt des Unfalls bis zum Beginn der Beurteilung durch das System wurde der relative Abstand zwischen beiden um 11,1 m verringert, und dann wurde der Bremsweg des Fahrzeugs einbezogen, was offensichtlich eine Erhöhung des Risikofaktors bedeutet.

Abbildung 5 Reaktionsabstand des Fahrzeugs bei unterschiedlichen Frameraten (80 km/h)
Dies ist einer der Hauptgründe, warum die meisten autonomen Fahrzeuge in dieser Phase in Szenarien mit niedriger bis mittlerer Geschwindigkeit und geringer Dynamik betrieben werden. Um die Wahrnehmungsfähigkeit des autonomen Fahrsystems so weit wie möglich zu verbessern, C-Fans256 hat seine Bildrate auf das branchenweit unerreichte 80-Hz-Niveau erhöht, in der Hoffnung, seine Stärke zur Realisierung des unbemannten Fahrens in Hochgeschwindigkeits- und hochdynamischen und komplexen Umgebungen beitragen zu können.
Die hohe Bildrate von 80 Hz sorgt für eine reibungslose und schnelle dynamische Erkennung. In einer realen Verkehrsumgebung kann die dynamische Erkennungszeit von unbemannten Fahrzeugen von der Größenordnung von Hunderten von Millisekunden auf die Größenordnung von zehn Millisekunden verkürzt werden, wodurch eine höhere Sicherheit erreicht wird.
4. Graustufenerkennung

Abbildung 8 Spurlinienerkennungseffekt bei Nacht
Die L2-Szenenbibliothek muss eine Teilmenge der L3-Szenenbibliothek sein, wie z. B. LCC-Spurzentrierungsassistent, ALC-Assistent für automatischen Spurwechsel, ACC-Vollgeschwindigkeits-Adaptive-Cruise, ATC-Adaptive-Curve-Cruise, LDW-Spurverlassen usw. Die Verwendung von Lidar kann Verbesserung des automatischen Fahrens Robustheit des Systems bei Nacht, Tunnelein- und -ausfahrten usw.
Diese Szenen beruhen hauptsächlich auf der genauen Erkennung von Fahrspurlinien und Straßenrändern durch den Sensor, was Anforderungen an das Graustufen-Erkennungsniveau von Lidar stellt, das eine genaue und präzise Graustufen-Erkennung erfordert.
C-Fans-256 bietet eine 8-Bit-Graustufenauflösung, die bei jedem Wetter eine klare Spurlinienerkennung realisieren und die Nachtwahrnehmungsfähigkeit des unbemannten Fahrsystems verbessern kann. (www.isurestar.net)