
Когда Тесла подчеркивал функциональные дефекты программного обеспечения FSD, он упомянул некоторые крайние случаи, такие как: «Статические объекты, такие как дорожный мусор, машины скорой помощи, строительные площадки, сложные перекрестки, любые препятствия, неблагоприятная погода и плотное движение. , Зонды-призраки. , мотоциклы, не соблюдающие правила дорожного движения и т.д.
Эти проблемы, с точки зрения R&D, представляют собой различные нерешенные потребности или ошибки, но с точки зрения потребителей эти проблемы означают, что программное обеспечение FSD чрезвычайно опасно.
Все эти проблемы можно решить с помощьюлидар. ПринимаяСуестарНапример, в продуктах серии C-Fans эти факторы учитывались в начале проектирования.
1.Высокое разрешение (0,1°×0,1°)

В процессе движения по городскому шоссе пешеходы, не соблюдающие правила дорожного движения на расстоянии, и транспортные средства, случайно движущиеся задним ходом по магистралям, с высоким разрешениемЛидарможет решить различные проблемы, с которыми сталкиваются современные радары миллиметрового диапазона и видеораспознавание. Система планирования решений обеспечивает стабильный сенсорный ввод. Хотя лидарные данные в реальном времени представляют собой разреженное облако точек, линия C-Fans256 с ее сверхвысоким разрешением 0,1°×0,1° все же может достигать плотности сетки 0,4×0,4 м на расстоянии 200 м. Для автомобиля шириной 1,8 м. Для обычного внедорожника высотой 1,8м матрицу 4х4 еще можно увидеть на 200м.
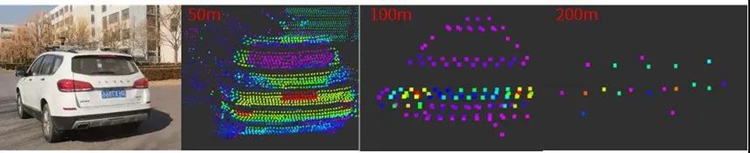
Рисунок 1. Облако точек, измеренных автомобилем C-Fans256.
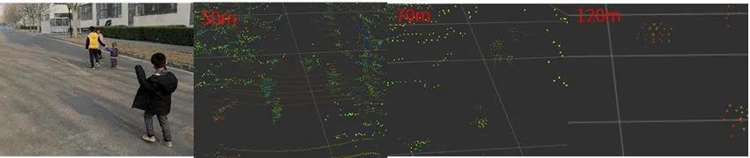
Рис. 2 C-Fans256 измеренное облако точек для детей (высота и 1,1 м)

Рис. 3 C-Fans256 измерил облако точек для небольших препятствий (20 см × 20 см × 20 см).
Высокое разрешение соответствует высокой плотности сетки, что позволяет обнаруживать более дальние и меньшие препятствия. В сложных городских дорожных условиях вы сможете найти удаленные детали в кратчайшие сроки. При высокоскоростном вождении вы можете заранее обнаружить движение или аномалию удаленных транспортных средств. , Эта возможность обнаружения означает более высокий уровень безопасности.
2. Большое поле зрения (150°×30°)
Незащищенный левый поворот на перекрестках и сложные сцены перекрестков в городских районах, большое поле зрения может предоставить автономным транспортным средствам богатую информацию о восприятии, особенно при выполнении разворотов, чем больше требуется поле зрения, тем лучше, обеспечиваемое C-Fans256 С FOV 150 ° × 30 °, он может обеспечить широкий диапазон обнаружения, когда транспортное средство поворачивает налево или разворот, и повышает безопасность системы автоматического вождения.
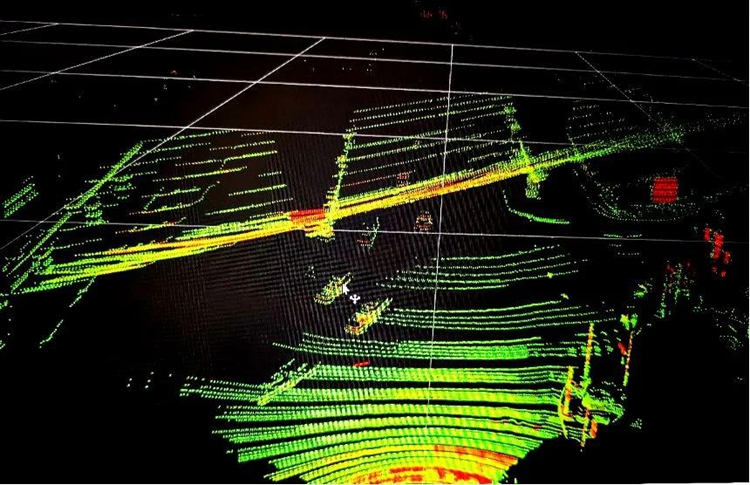
Рисунок 4 Облако точек C-Fans256
3. Высокая частота кадров (80 Гц)
В чрезвычайных ситуациях, съезде с главной дороги на высокой скорости, резком торможении на высокой скорости и в других сценариях точные и быстрые возможности лидара по прямому измерению контуров могут помочь автономным транспортным средствам реагировать в течение 100 миллисекунд. Ключевым показателем на данный момент является частота кадров. Если зонд-призрак или автомобиль внезапно затормозит, относительная скорость составит 80 км/ч. Если частота кадров радара составляет 10 Гц, алгоритм слежения завершил расчет за 5 кадров, что означает, что расстояние реакции транспортного средства составляет:
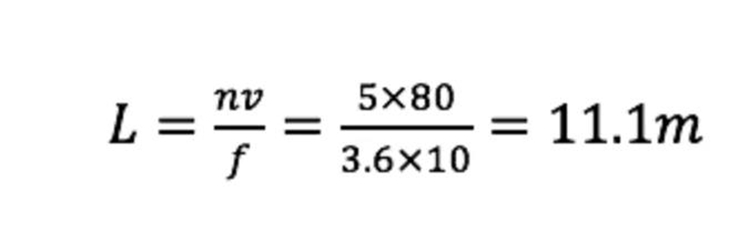
С того момента, когда произошла авария, система начала выносить суждения, относительное расстояние между ними было уменьшено на 11,1 м, а затем был включен тормозной путь транспортного средства, что, очевидно, означает увеличение фактора риска.

Рис. 5. Расстояние реакции автомобиля при различной частоте кадров (80 км/ч)
Это одна из основных причин, по которой большинство автономных транспортных средств на данном этапе работают в сценариях с низкой и средней скоростью и низкой динамикой. Чтобы максимально улучшить способность восприятия системы автономного вождения, C-Fans256 увеличил частоту кадров до неслыханного в отрасли уровня 80 Гц, надеясь внести свой вклад в реализацию беспилотного вождения в высокоскоростных, высокодинамичных и сложных условиях.
Высокая частота кадров 80 Гц обеспечивает плавное и быстрое динамическое обнаружение. В условиях реального дорожного движения время динамического обнаружения беспилотных транспортных средств может быть сокращено с порядка сотен миллисекунд до порядка десяти миллисекунд, что повышает безопасность.
4. Распознавание оттенков серого

Рис. 8. Эффект распознавания линии полосы движения ночью
Библиотека сцен L2 должна быть подмножеством библиотеки сцен L3, например, помощь в центрировании полосы движения LCC, помощь в автоматической смене полосы движения ALC, адаптивный круиз ACC на полной скорости, адаптивный круиз ATC по кривой, выезд с полосы движения LDW и т. д. Использование лидара может улучшить автоматическое вождение Надежность системы в ночное время, въезды и выезды из туннелей и т. д.
Эти сцены в основном зависят от точного обнаружения датчиком линий полосы движения и обочин дороги, что выдвигает требования к уровню распознавания оттенков серого лидара, который требует точного и точного распознавания оттенков серого.
C-Fans-256 обеспечивает 8-битное разрешение в оттенках серого, что позволяет реализовать четкое распознавание линий полосы движения в любую погоду и улучшить способность беспилотного вождения воспринимать ночное время.www.isurestar.net)