
Будут ли портативные устройства в погоне за «меньше» снижать производительность?
Ответ Surestar: «Нисколько!»
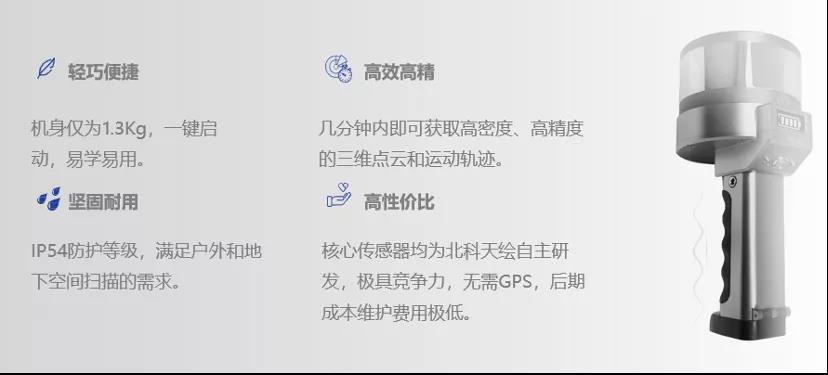
Весной этого года Surestar выпустила первыйпортативный 3D LiDAR- «СтарСкан», который не только очень компактен и весит менее 1,3 кг, но и обладает глубоким «внутренним питанием».
Новый высокоточный алгоритм SLAM, используемый разведчиком, позволяет ему эффективно и с высоким качеством выполнять геодезические и картографические задачи в самых разных сценариях, что можно назвать «поляроидом» геодезической и картографической индустрии.
Сегодня пусть Xiaohui познакомит всех с «самым мощным мозгом» маленького «разведчика»-алгоритма SLAM и увидит, как он может играть с 3D-измерениями!
SLAM (одновременная локализация и сопоставление) означает синхронное позиционирование и сопоставление. Кажется, что это особо профессиональная и сложная техническая концепция, но на самом деле разобраться в SLAM несложно.
Например, процесс первого посещения парка или выставки можно условно разделить на следующие пять этапов:
1. Увидеть и запомнить маркеры в вашем окружении;
2. На основе информации, увиденной глазами, используйте положение маркера в уме, чтобы построить «карту»;
3. По мере изменения собственного положения постоянно видеть и запоминать новые ориентиры, расширять масштаб «карты» и одновременно изменять детали;
4. Определите свое текущее положение в парке или выставочном зале по «карте», которая расширяет границы и корректирует детали в вашем мозгу;
5. Пройдя некоторое время, сравнивая «карту» в своем уме с вещами в вашем видении в данный момент, вы можете подтвердить, были ли вы в этом месте раньше и шли ли вы тем же путем.
Принцип SLAM на самом деле очень похож на описанный выше процесс, за исключением того, что он выполняется машинами и оборудованием, а не «живыми людьми». SLAM обычно включает в себя следующие части: извлечение признаков, сопоставление данных, оценку состояния, обновление состояния и обновление признаков. Говоря простым языком, «открывайте карту во время ходьбы», подобно тому, как мы играем в стратегии в реальном времени.

Как и в RTS-играх, куда идет человек/устройство, туда и «просмотр».
С точки зрения сценариев практического применения подметальный робот является наиболее типичным и относительно простым приложением SLAM, наиболее близким к нашей повседневной жизни. Подметальный робот автоматически планирует маршрут уборки, опираясь на технологию SLAM, что позволяет ему «освоить» «панорамную карту» пола помещения.
Именно благодаря совершенно новому высокоточному алгоритму SLAM «StarScan», независимо разработанный компанией Surestar, может эффективно выполнять операции во время движения. Сканирующее оборудование для съемки и картографирования, такое как лидар, оснащенный алгоритмами SLAM, можно назвать «полароидом» индустрии съемки и картографии.
Удовлетворение потребности в эффективных действиях в движении — это только первый уровень деятельности «разведывательной» силы. С помощью алгоритма SLAM «разведка» может выполнять операции съемки и картографирования в сложных областях, таких как подземелье, помещения, туннели и т. Д., Получать высокоточные данные облака точек с высокой плотностью и достигать идеального закрытия.
Это связано с тем, что карта, построенная алгоритмом SLAM, является «полной картой», то есть каждый уголок рабочей области может быть воспринят без препятствий, независимо от размера. Будь то узкая, извилистая или сложная по пространственной структуре среда, «разведка» позволяет достичь полного диапазона точного восприятия в операционной зоне, «не отпуская ни одной зацепки».
Облако точек подземного гаража "Звездный разведчик" - полное и подробное
Благодаря алгоритму SLAM «разведка» не должна полностью полагаться на спутниковое позиционирование во время операций. В процессе сканирования закрытой области, даже если нет сигнала GPS, «разведка» может легко обеспечить точное сопоставление с облаком точек.
Точно так же, как когда люди определяют свое собственное местоположение, большинство людей не будут открывать приложение карты, чтобы увидеть местоположение. В фиксированной области, будь то человеческий мозг или алгоритм SLAM разведчика, он может полагаться на «память» для подтверждения своего местоположения без необходимости постоянно обращаться за помощью к спутниковому позиционированию.
«StarScan» имеет базовую трехмерную дальность 200 м, поле сканирования 360°x30° и частоту импульсов 320 000 точек в секунду. Рабочая зона площадью 5000 м², от сбора данных до обработки данных, занимает всего 10 минут, чтобы завершить работу.
В процессе проектирования и разработки «СтарСкан»,Компания Surestar провела масштабные эксперименты по сбору данных, чтобы постоянно оптимизировать алгоритм модели ошибки. Наконец, этопортативный высокоточный LiDARдостигнута сантиметровая абсолютная точность данных.
В сочетании с толщиной облака точек менее 5 см он совместно поддерживает «разведку» для получения высокоточного трехмерного облака точек высокой плотности и возможностей измерения траектории движения, так что все детали в целевой области операции являются подробными.
Можно точно воспроизвести детали облака точек древнего здания «Звездный разведчик», такие как карнизы и столбы.
В дополнение к превосходным базовым параметрам съемки и картографирования, небольшой корпус разведчика также объединяет множество технологий, которые могут повысить производительность съемки и картографирования. Например, инерциальная навигационная система с 9 степенями свободы позволяет разведчикам достигать точных измерений и свободной работы даже в условиях волнистого грунта, рабочего положения или угла наклона цели.
Кроме того, «StarScan» также использует технологию компенсации наклона, поддерживает автоматическую горизонтальную коррекцию ±10° и может собирать данные под разными углами и со всех направлений. Например, при сканировании опор линий электропередач, башен и фасадов высотных зданий геодезический и картографический персонал на земле может использовать «разведку», чтобы легко получить полные трехмерные данные облака точек и связанную с ними информацию.
С деревьями высотой в несколько метров и зданиями высотой в десятки метров «разведчики» могут точно получить облака точек.
«Study» также поддерживает операции со скоростью движения 2 м/с. Для транспортных средств и даже людей эта скорость может показаться очень низкой, но в процессе съемки и картографирования, особенно при использовании портативных устройств для съемки и картографирования, 2 м/с можно назвать «быстрым движением».
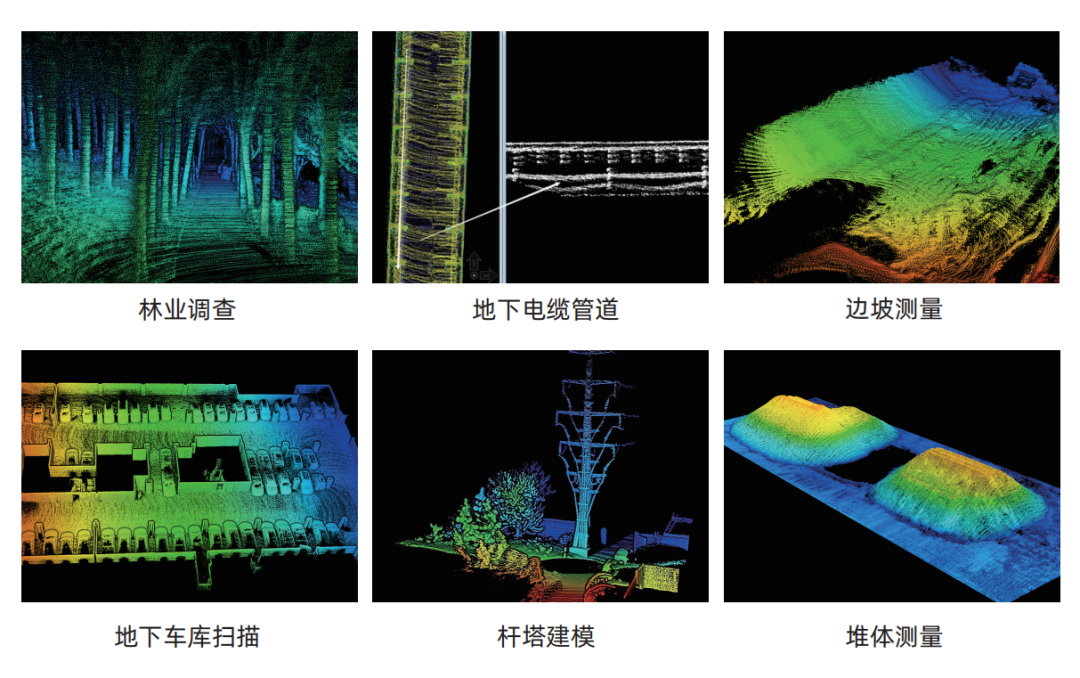
С совместным благословением алгоритма SLAM и многих технологий «разведка» может спокойно справляться с съемкой и картографированием различных сцен, мест и задач, сканированием внутренних и подземных пространств в зданиях, измерением объема, сельскохозяйственными и лесными обследованиями, муниципальными садами, и проверки электроснабжения. В таких областях, как моделирование линий, башен и фасадов зданий, операции могут быть выполнены экономически эффективным способом с высоким качеством и количеством.
Накопление Surestar в области лидара за более чем десять лет позволило сконденсировать многие технические возможности в маленьком корпусе «разведчика», так что он показал всесторонний и ослепительный свет в области съемки и картографии. За «лучший ответ на проблему лазерного сканирования последней мили».