
Эпоха хай-эндаавтономное вождениедействительно пришел. Неосознанно автономные транспортные средства уровня L3 на рынке совершили скачок «от ничего к большему».
От L2 до L3 система автономного вождения, наконец, взяла на себя важную задачу наблюдения за окружением автомобиля от водителя. Важность способности восприятия для автономных транспортных средств также была поднята на беспрецедентную высоту.
В процессе изучения более сильных возможностей восприятия новые производители автомобилей и традиционные автомобильные компании постепенно пришли к консенсусу в отношении того, какие датчики выбрать: только путем слияния и применения датчиков можно лучше удовлетворить потребности в восприятии автономных транспортных средств высокого класса.
Воспринимайте «основной модельный ряд» самоуправляемых автомобилей
Недавно BMW Group объявила, что предоставит потребителям услуги по обновлению возможностей автономного вождения L3 в виде «дополнительного пакета обновлений» для своего седана 7-й серии. Даже после того, как новые силы автомобильного производства выпустили автономные транспортные средства L3, традиционные автомобильные компании также начали добиваться больших успехов в эволюции автономного вождения.
Глядя на модели L3 с автоматическим управлением, которые были проданы или анонсированы на рынке, нетрудно обнаружить, что нынешние автомобильные компании очень последовательны в конфигурации датчиков системы восприятия беспилотных транспортных средств. Камеры,лидары, радары миллиметрового диапазона и ультразвуковые радары стали «четырьмя лучшими вариантами», признанными автомобильными компаниями.
Итак, для автономных транспортных средств, каковы функции этих четырех типов датчиков, и каковы их преимущества и недостатки? Пусть Xiaohui объяснит вам это один за другим.
Камера
Среди четырех основных типов сенсоров камера имеет наиболее развитую технологию, относительно широкий спектр приложений и относительно низкую стоимость. В то же время он имеет значительные преимущества с точки зрения разрешения, одного из основных параметров восприятия. В настоящее время разрешение камеры, установленной на беспилотном автомобиле, использующем решение для визуального восприятия, обычно может достигать 1280x960 пикселей. Это эквивалентно мониторингу и восприятию окружающей среды кузова автомобиля в виде «прямой трансляции высокой четкости».
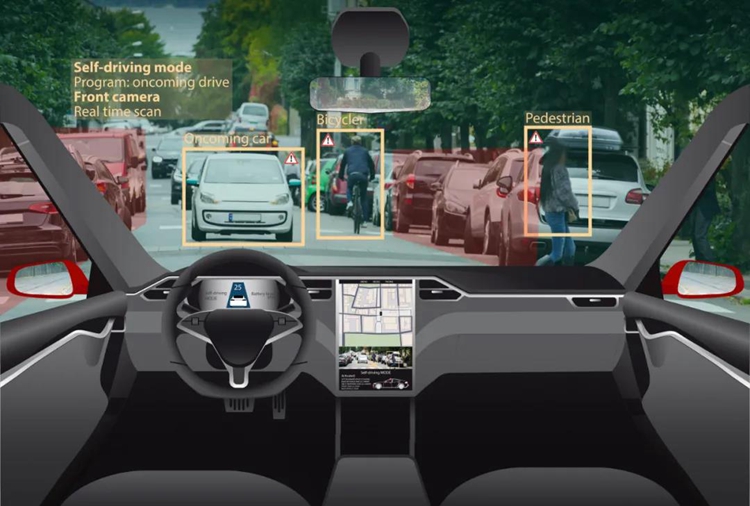
При поддержке алгоритма камера также может осуществлять классификацию объектов в зоне обзора в процессе зондирования.
Несмотря на столько преимуществ, камера не может «занять лидерство» в системе восприятия автономного вождения. Это связано не только с его ограниченным полем зрения, он может фокусироваться только на ограниченном поле зрения. Это также связано с тем, что данные или изображение, которые он получает, являются двумерными, без информации о значении глубины и не могут точно отражать относительное расстояние между различными объектами в пределах диапазона обнаружения. Камера требует сложной поддержки алгоритмов и других типов приложений для слияния датчиков.
лидар
Лидар обладает выдающимися преимуществами, такими как высокая точность, большой радиус действия, хорошая производительность в реальном времени и богатый сбор информации. Возьмите твердотельный накопитель со сверхвысоким разрешением на уровне изображения.лидар C-Fans-256Например, разработанный Surestar, этот LiDAR может точно захватывать и воспринимать людей, автомобили и объекты на расстоянии 200 м, а также обладает динамическим захватом с малой задержкой и возможностями точного распознавания оттенков серого.
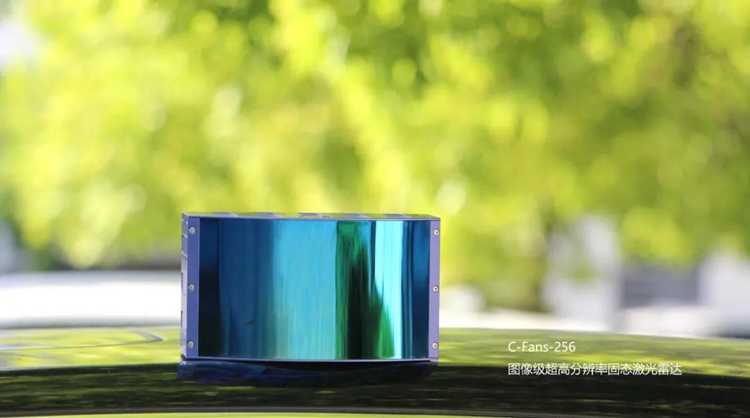
C-Вентиляторы-256
С технической точки зрения лидар даже можно назвать «идеальным датчиком автономного вождения». Однако в лидар интегрировано большое количество прецизионных оптоэлектронных компонентов, а технологический уровень очень высок. Нынешняя нехватка продуктов на рынке, соответствующих стандартам автомобильного законодательства, в определенной степени повлияла на энтузиазм автомобильных компаний в использовании лидарных продуктов.
Радар миллиметрового диапазона
Радар миллиметрового диапазона также относится к классу датчиков окружающей среды с относительно зрелой технологией, а его эксплуатационные преимущества сосредоточены в двух аспектах измерения скорости и дальности и надежности.

Внутренняя структура радара миллиметрового диапазона
Однако из-за того, что на миллиметровую волну существенное влияние оказывает затухание и поглощение атмосферой, она не может выполнять точное и непрерывное моделирование препятствий в динамическом процессе движения транспортного средства. В результате радар миллиметрового диапазона может решить только проблему «видеть», но не проблему «четкого видения» для автоматической системы восприятия вождения.
Ультразвуковой радар
Ультразвуковой радар использует ультразвуковые волны в качестве воспринимающей среды и вычисляет относительное положение и расстояние между транспортным средством и объектами в зоне измерения, вычисляя разницу во времени между отправкой и получением ультразвуковых волн, точность обнаружения чрезвычайно высока.
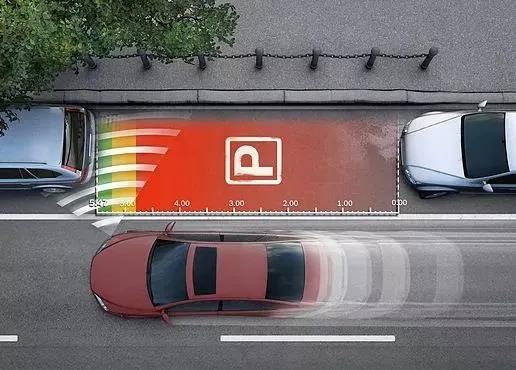
Основные сценарии применения ультразвукового радара: автоматическая парковка
Однако эффективная дальность обнаружения ультразвуковых радаров очень мала, а передача и прием ультразвуковых волн более чувствительны к погодным условиям, чем миллиметровые волны. В высокоскоростных средах ошибка ультразвуковой дальнометрии также будет увеличиваться из-за низкой скорости среды обнаружения. Это делает его сценарии приложений ограниченными низкоскоростными сценариями.
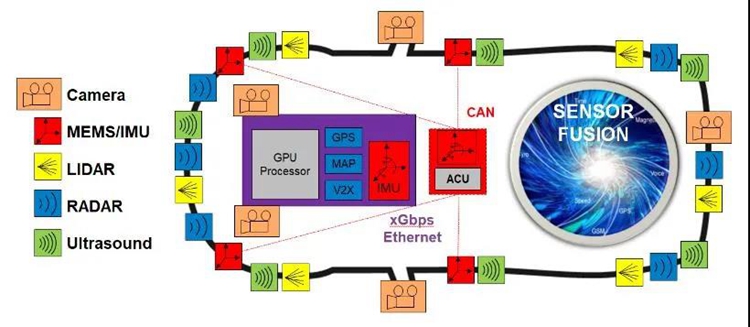
Какое решение лучше всего подходит для слияния датчиков?
Четыре основных датчика с отличительными характеристиками и соответствующими сильными сторонами составляют «основную линейку» автономной системы восприятия вождения. Однако для достижения автономного вождения высокого уровня недостаточно полагаться на простое наложение друг на друга и сопоставление различных датчиков. Благодаря четкой, органичной и унифицированной схеме слияния датчиков «химическая реакция» между основными датчиками стимулируется для достижения лучшей производительности. Перцептивные характеристики беспилотного транспортного средства и вспомогательный датчик, дополняющие общие возможности системы, необходимы для создания автономной системы восприятия транспортного средства.
Камера экономична, а технология отработана. Будь то с точки зрения затрат или производства, у автомобильных компаний нет причин отказываться от него в процессе создания беспилотных автомобилей. Ультразвуковой радар из-за его слабой и надежной среды обнаружения и очень ограниченной дальности обнаружения обречен на то, чтобы не стать ядром системы обнаружения.
Таким образом, «лидар + камера» и «радар миллиметрового диапазона + камера» в настоящее время являются двумя наиболее признанными решениями для объединения датчиков в отрасли.
Радар миллиметрового диапазона может эффективно компенсировать проблему, заключающуюся в том, что исходные данные, собранные камерой, не содержат информации о значении глубины, что является основной причиной, по которой некоторые автомобильные компании выбирают это решение. Однако разрешение цели радара миллиметрового диапазона очень низкое, и в некоторых сценах невозможно даже определить размер и контур цели. Их слияние больше похоже на «одностороннюю» камеру радара миллиметрового диапазона, чем на взаимное достижение. Это означает, что слияние на уровне дна и глубине не может быть достигнуто между ними, и чаще их можно использовать только в форме «упрощенного слияния» для решения некоторых задач измерения скорости цели или отслеживания траектории.
Хотя в последние годы, под влиянием технологических инноваций и прогресса, радары миллиметрового диапазона неоднократно преодолевали потолок производительности по разрешению и другим характеристикам, но с этим возникают такие проблемы, как высокая цена передовых продуктов и преждевременное применение. крупномасштабных приложений. «Миллиметровый радар + камера» превратился в «может быть, будущее можно увидеть, но настоящее нельзя понять».
Лидар провозглашен в отрасли «глазом автономного вождения». Только с точки зрения характеристик восприятия он занимает первое место среди всех типов датчиков, необходимых для систем автономного вождения. Лидар излучает и принимает высокочастотные лазеры для получения информации о местоположении, что позволяет ему достигать чрезвычайно высокой точности дальности и возможностей защиты от помех окружающей среды. По сравнению с другими 3D-датчиками диапазон лидара имеет очевидные преимущества.
Возьмем серию твердотельных лидаров C-Fans в линейке навигационных продуктов Surestar: эта серия продуктов является первым отечественным фронтальным лидаром с полной конструкцией для автомобиля, с разрешением 0,1 ° x 0,1 ° и полный диапазон поля зрения азимутального сканирования может легко осуществлять крупномасштабный и дальний мониторинг области, а также обеспечивать широкое поле зрения в сложных сценах, таких как незащищенный левый поворот и т. д., чтобы заботиться о транспортных средствах или пешеходы справа.
Сверхвысокая частота кадров уровня спортивной камеры дает этому лидару мощное поле зрения и возможность фиксировать аномальные события, будь то обнаружение препятствий, зондов-призраков, слияние на высокой скорости с основной дорогой, внезапный высокоскоростной торможение и автоматическое вождение в сложных сценах. Он имеет хорошие характеристики, которые больше подходят для высокоскоростных, динамичных и сложных реальных условий вождения.
Хотя лидар немного неадекватен для реализации восприятия из-за таких факторов, как угол запуска высокочастотных лазеров, например, когда лидар обнаруживает удаленные объекты, получаемая информация о положении точки часто бывает скудной. Разница в отражательной способности высокочастотных лазеров Материала для распознавания препятствий немного недостаточно в сложных реальных условиях вождения. Однако интеграция с камерой — способ восполнить эти недостатки и вывести общее восприятие системы на более высокий уровень.
При условии завершения калибровки и синхронизации лидара и камеры облако точек лидара можно откалибровать и спроецировать на плоскость изображения камеры для формирования относительно разреженной, но очень точной карты глубины. В сочетании с результатами обработки алгоритма изображения система восприятия автономного вождения может получать точные и плотные данные о глубине практически без слепых зон, сглаживать влияние немного разреженного локального облака точек при обнаружении дальних целей, а также может передавать высота камеры. Разрешение реального изображения повышает способность различать различные препятствия с одинаковым положением из одного и того же материала. Таким образом, относительное расстояние, профиль положения и скорость движения препятствий могут быть точно определены в пределах большого диапазона обнаружения, а надежность всей системы обнаружения значительно повышается.

В то же время отечественные и зарубежные производители LiDAR, такие как Surestar, в последние годы добились больших успехов в области жгута проводов, миниатюризации, соответствия транспортных средств и контроля затрат. Завершены и усилены слабые звенья в общей системе возможностей лидарных продуктов одно за другим, что позволило объединению датчиков «лидар + камера» удовлетворить потребности автомобильных компаний и владельцев автомобилей в автономных системах восприятия вождения на этом этапе и в будущем. будущее. Достижение «твердо основанного на настоящем и твердого понимания будущего» также делает трон основного основного датчика системы восприятия лидарного автопилота более стабильным и долгосрочным. (www.isurestar.net)