
Na busca pelo "menor", os dispositivos portáteis comprometerão o desempenho?
A resposta de Surestar é: "De jeito nenhum!"
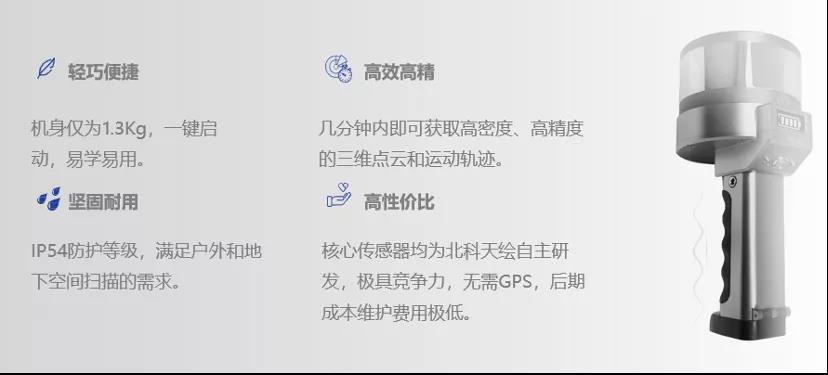
Nesta primavera, a Surestar lançou o primeiro produto autodesenvolvidoportátil 3D LiDAR-"StarScan", que não só é muito compacto e pesa menos de 1,3kg, mas também possui uma "potência interna" profunda.
O novo algoritmo SLAM de alta precisão usado pelo scout permite que ele conclua tarefas de levantamento e mapeamento de forma eficiente e com alta qualidade em uma variedade de cenários, que podem ser chamados de "polaroid" da indústria de levantamento e mapeamento.
Hoje, deixe Xiaohui levar todos para o "cérebro mais poderoso" do pequeno algoritmo "scout"-SLAM e veja como ele pode brincar com a medição 3D!
SLAM (Simultaneous Localization And Mapping) significa posicionamento e mapeamento síncronos. Parece ser um conceito técnico particularmente profissional e difícil, mas na verdade não é complicado entender o SLAM.
Por exemplo, o processo de visitar um parque ou exposição pela primeira vez pode ser dividido em cinco etapas:
1. Veja e lembre-se dos marcadores ao seu redor;
2. Com base nas informações vistas pelos olhos, use a localização do marcador em sua mente para construir um "mapa";
3. Conforme a própria posição muda, constantemente veja e lembre-se de novos pontos de referência, expanda o escopo do "mapa" e modifique os detalhes ao mesmo tempo;
4. Determine sua posição atual no parque ou sala de exposições de acordo com o "mapa" que amplia o escopo e corrige os detalhes em seu cérebro;
5. Depois de caminhar um pouco, comparando o "mapa" em sua mente com as coisas em sua visão no momento, você pode confirmar se já esteve neste lugar antes e se seguiu o mesmo caminho.
O princípio do SLAM é realmente muito semelhante ao processo descrito acima, exceto que é concluído por máquinas e equipamentos, em vez de "pessoas vivas". SLAM geralmente inclui as seguintes partes, extração de recursos, associação de dados, estimativa de estado, atualização de estado e atualização de recursos. Em termos leigos, "abra o mapa enquanto caminha", semelhante a como jogamos jogos de estratégia em tempo real.

Como jogos RTS, onde a pessoa/dispositivo vai, a "visão" vai
Do ponto de vista dos cenários de aplicação prática, o robô varredor é a aplicação SLAM mais típica e relativamente simples mais próxima de nossas vidas diárias. O robot varredor planeia automaticamente o percurso de limpeza, contando com a tecnologia SLAM, permitindo-lhe “dominar” o “mapa panorâmico” do chão da divisão.
É precisamente por causa de seu novo algoritmo SLAM de alta precisão que o "StarScan" desenvolvido independentemente pela Surestar pode concluir operações com eficiência durante o movimento. Equipamentos de varredura de levantamento e mapeamento, como lidar equipado com algoritmos SLAM, podem ser chamados de "polaroid" da indústria de levantamento e mapeamento.
Satisfazer a demanda por operações eficientes em movimento é apenas o primeiro nível de desempenho da força "scouting". Por meio do algoritmo SLAM, o "scouting" pode concluir operações de levantamento e mapeamento em áreas complexas, como subsolo, interior, túnel, etc., obter dados de nuvem de pontos de alta precisão e alta densidade e obter um fechamento perfeito.
Isso porque o mapa construído pelo algoritmo SLAM é um “mapa completo”, ou seja, cada canto da área de trabalho pode ser percebido sem obstáculos, independente do tamanho. Quer se trate de um ambiente de estrutura espacial estreito, tortuoso ou complexo, o "scouting" pode alcançar uma gama completa de percepção precisa na área de operação, "não deixar nenhuma pista".
Ponto de garagem subterrânea "Star Scout" completo e detalhado
Graças ao algoritmo SLAM, o "scouting" não precisa depender inteiramente do posicionamento do satélite durante as operações. No processo de varredura de área fechada, mesmo que não haja sinal de GPS, o "scouting" pode facilmente alcançar uma correspondência precisa da nuvem de pontos.
Assim como quando as pessoas determinam sua própria localização, a maioria das pessoas não abre o aplicativo de mapa para ver a localização. Em uma área fixa, seja um cérebro humano ou um algoritmo SLAM de um batedor, ele pode contar com a "memória" para confirmar sua localização, sem a necessidade de buscar a todo momento o auxílio do posicionamento por satélite.
O "StarScan" tem um alcance tridimensional central de 200m, um campo de visão de varredura de 360°x30° e uma frequência de pulso de 320.000 pontos por segundo. Uma área de trabalho de 5000m², desde a coleta de dados até o processamento de dados, leva apenas 10 minutos para concluir o trabalho.
No processo de design e desenvolvimento do "StarScan",A Surestar realizou experimentos massivos de coleta de dados para otimizar continuamente o algoritmo do modelo de erro. Finalmente, issoportátil de alta precisão LiDARalcançou a precisão absoluta dos dados em nível de centímetro.
Juntamente com sua espessura de nuvem de pontos de menos de 5 cm, ele suporta em conjunto o "scouting" para obter recursos de medição de nuvem de pontos tridimensionais de alta precisão e alta densidade e de trajetória de movimento, para que todos os detalhes na área alvo da operação são detalhados.
Os detalhes da nuvem do ponto de construção antigo "Star Scout", como beirais e pilares, podem ser reproduzidos com precisão
Além dos excelentes parâmetros básicos de levantamento e mapeamento, o pequeno corpo do batedor também integra muitas tecnologias que podem melhorar o desempenho de levantamento e mapeamento. Por exemplo, o sistema de navegação inercial de 9 graus de liberdade permite que os batedores obtenham medições precisas e operação livre mesmo quando o terreno é ondulado, a posição de trabalho ou o alvo tem um ângulo de inclinação.
Além disso, o "StarScan" também usa tecnologia de compensação de inclinação, suporta correção automática de ±10° horizontal e pode coletar dados de vários ângulos e todas as direções. Por exemplo, ao digitalizar postes de energia, torres e fachadas de arranha-céus, o pessoal de levantamento e mapeamento no solo pode usar "scouting" para obter facilmente dados completos da nuvem de pontos 3D e informações relacionadas.
Com árvores de alguns metros de altura e edifícios com dezenas de metros de altura, os "scouters" podem obter nuvens de pontos com precisão
"Study" também suporta operações a uma velocidade de movimento de 2m/s. Para veículos e até humanos, essa velocidade pode parecer muito lenta, mas no processo de levantamento e mapeamento, especialmente ao usar dispositivos portáteis para levantamento e mapeamento, 2m/s pode ser chamado de "movimento rápido".
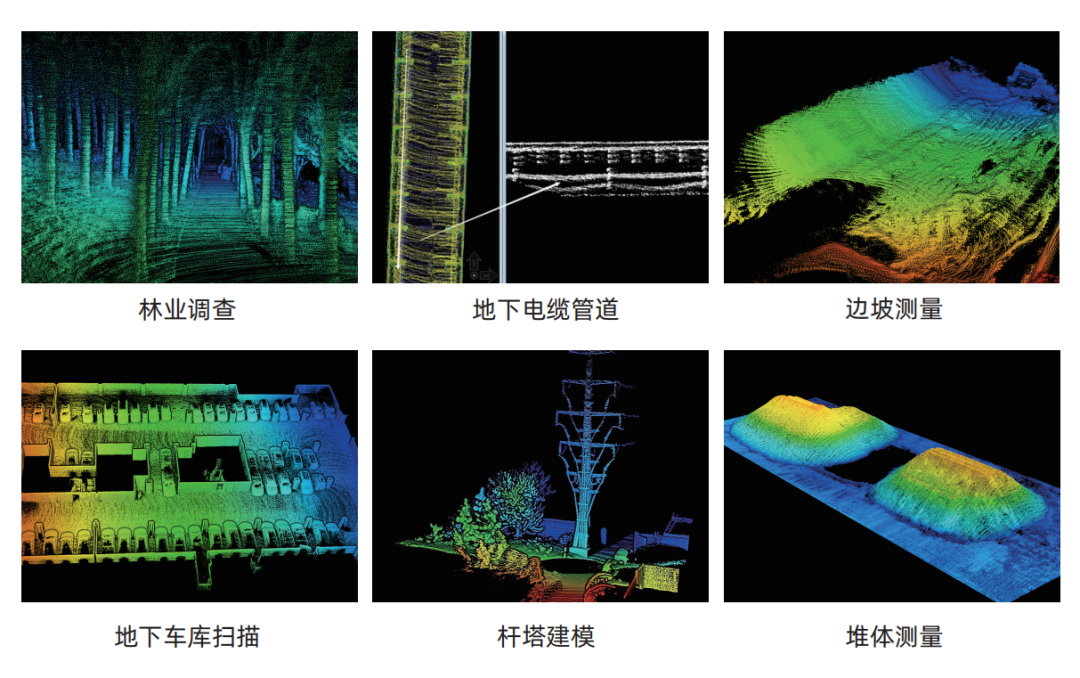
Com a bênção conjunta do algoritmo SLAM e muitas tecnologias, o "scouting" pode enfrentar com calma as operações de levantamento e mapeamento de diferentes cenas, locais e tarefas, escaneando espaços internos e subterrâneos em edifícios, medição de volume, levantamentos agrícolas e florestais, jardins municipais, e inspeções de energia elétrica. Em campos como linhas, torres e modelagem de fachadas de edifícios, as operações podem ser concluídas de maneira econômica com alta qualidade e quantidade.
O acúmulo de Surestar no campo de lidar por mais de dez anos permitiu que muitas capacidades técnicas fossem condensadas no pequeno corpo do "scout", de modo que ele mostrou uma luz abrangente e deslumbrante no campo de levantamento e mapeamento. Para "a melhor resposta para o problema da varredura a laser na última milha".