
A era do high-endcondução autônomarealmente veio. Sem saber, os veículos autônomos de nível L3 no mercado completaram o salto de "do nada para mais".
De L2 a L3, o sistema de direção autônoma finalmente assumiu a importante tarefa de monitorar os arredores do veículo do motorista. A importância da capacidade de percepção para veículos autônomos também foi elevada a uma altura sem precedentes.
No processo de explorar capacidades de percepção mais fortes, os novos fabricantes de automóveis e as empresas de automóveis tradicionais chegaram gradualmente a um consenso sobre quais sensores escolher: somente pela fusão e aplicação de sensores as necessidades de percepção de veículos autônomos de ponta podem ser melhor atendidas.
Perceba a "linha principal" da direção autônoma
Recentemente, o BMW Group anunciou que fornecerá aos consumidores serviços de atualização de capacidade de direção autônoma L3 na forma de um "pacote de atualização opcional" em seu sedã da série 7. Mesmo depois que as novas forças da fabricação de automóveis lançaram veículos autônomos L3, as montadoras tradicionais também começaram a dar grandes passos na evolução da direção autônoma.
Olhando para os modelos autônomos L3 que foram vendidos ou anunciados no mercado, não é difícil perceber que as montadoras atuais são altamente consistentes na configuração do sensor do sistema de percepção do veículo autônomo. Câmeras,lidas, radares de ondas milimétricas e radares ultrassônicos tornaram-se "as únicas quatro melhores escolhas" reconhecidas pelas montadoras.
Então, para veículos autônomos, quais são as funções desses quatro tipos de sensores e quais são suas vantagens e desvantagens? Deixe Xiaohui explicar para você um por um.
Câmera
Entre os quatro tipos de sensores convencionais, a câmera possui a tecnologia mais madura, uma gama relativamente ampla de aplicações e um custo relativamente baixo. Ao mesmo tempo, apresenta vantagens significativas em termos de resolução, um dos principais parâmetros do desempenho perceptivo. Atualmente, a resolução da câmera montada no carro autônomo que adota a solução de percepção visual pode atingir 1280x960 pixels em geral. É equivalente a monitorar e perceber o ambiente ao redor da carroceria do veículo na forma de "transmissão ao vivo de alta definição".
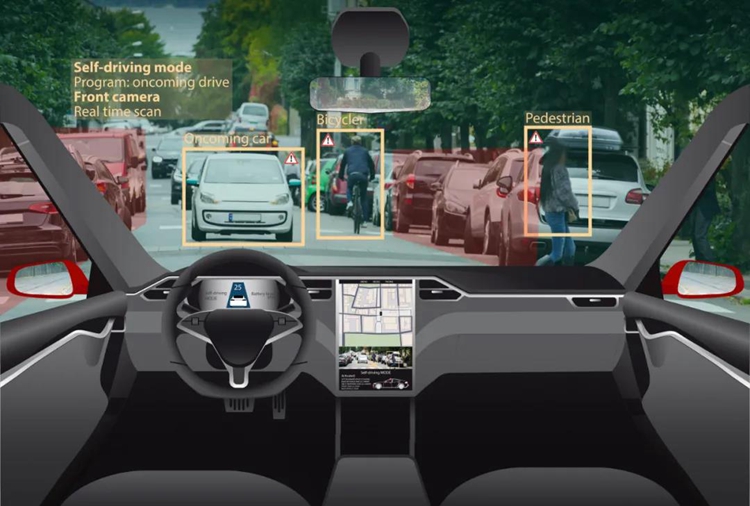
Com o suporte do algoritmo, a câmera também pode realizar a classificação de objetos na área de pesquisa durante o processo de detecção
Apesar de tantas vantagens, a câmera não consegue "sair na frente" no sistema de percepção de direção autônoma. Isso não se deve apenas ao seu campo de visão limitado, ele só pode se concentrar em um campo de visão limitado. É também porque os dados ou imagens obtidos são bidimensionais, sem informações de valor de profundidade e não podem refletir com precisão a distância relativa de diferentes objetos dentro do alcance de detecção. A câmera requer suporte a algoritmos complexos e outros tipos de aplicativos de fusão de sensores.
LiDAR
O Lidar tem vantagens excepcionais, como alta precisão, longo alcance, bom desempenho em tempo real e rica coleção de informações. Pegue o estado sólido de resolução ultra-alta em nível de imagemlidar C-Fans-256desenvolvido pela Surestar como exemplo, este LiDAR pode capturar e perceber com precisão pessoas, carros e objetos a uma distância de 200m e possui captura dinâmica de baixa latência e recursos de reconhecimento fino em escala de cinza.
C-Fans-256
Do ponto de vista técnico, o lidar pode até ser chamado de "sensor de direção autônoma perfeito". No entanto, um grande número de componentes optoeletrônicos de precisão está integrado no lidar e o nível tecnológico é muito alto. A atual escassez de produtos no mercado que atendem aos padrões dos regulamentos automotivos afetou, até certo ponto, o entusiasmo das montadoras em usar produtos lidar.
Radar de Ondas Milimétricas
O radar de ondas milimétricas também é uma classe de sensores ambientais com tecnologia relativamente madura, e suas vantagens de desempenho estão concentradas nas duas dimensões de medição de velocidade e alcance e robustez.

Estrutura interna do radar de ondas milimétricas
No entanto, como a onda milimétrica é significativamente afetada pela atenuação e absorção da atmosfera, ela não pode realizar uma modelagem precisa e contínua de obstáculos no processo dinâmico de condução do veículo. Como resultado, o radar de ondas milimétricas só pode resolver o problema de "ver", mas não o problema de "ver claramente" para o sistema automático de percepção de direção.
Radar Ultrassônico
O radar ultrassônico usa ondas ultrassônicas como meio de detecção e calcula a posição relativa e a distância entre o veículo e os objetos na área de medição calculando a diferença de tempo entre enviar e receber ondas ultrassônicas, a precisão da detecção é extremamente alta.
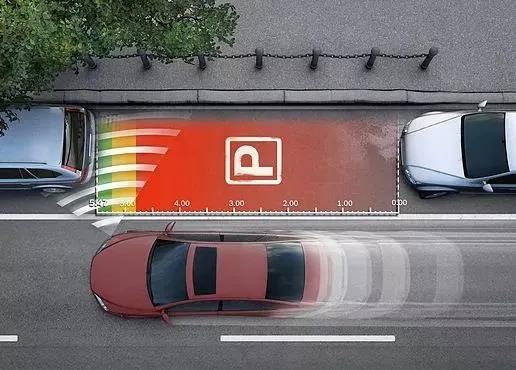
Principais cenários de aplicação do radar ultrassônico: estacionamento automático
No entanto, a faixa de detecção efetiva do radar ultrassônico é muito curta e a transmissão e recepção de ondas ultrassônicas são mais suscetíveis às condições climáticas do que as ondas milimétricas. Em ambientes de alta velocidade, o erro de alcance ultrassônico também aumentará devido à baixa velocidade do meio de detecção. Isso torna seus cenários de aplicação limitados a cenários de baixa velocidade.
Qual a melhor solução para fusão de sensores?
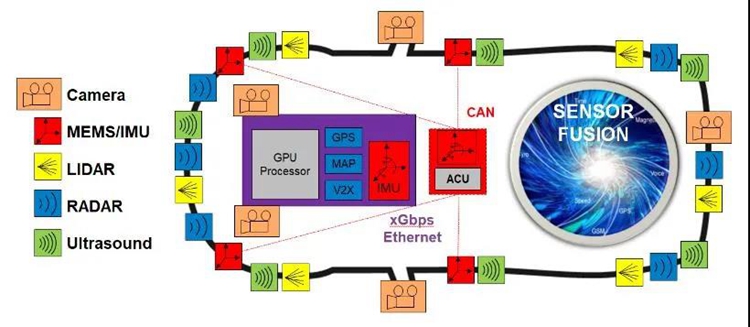
Quatro sensores convencionais com características distintas e seus respectivos pontos fortes formam a "linha principal" do sistema de percepção de direção autônoma. No entanto, para alcançar uma direção autônoma de alto nível, não basta contar com o simples empilhamento e justaposição de diferentes sensores. Através de um esquema de fusão de sensores claro, orgânico e unificado, a "reação química" entre os sensores centrais é estimulada para alcançar um melhor desempenho. O desempenho perceptivo do veículo autônomo e o sensor auxiliar para complementar a capacidade geral do sistema são necessários para criar um sistema autônomo de percepção do veículo.
A câmera é econômica e a tecnologia é madura. Seja do ponto de vista de custo ou de produção, as montadoras não têm motivos para abandoná-lo no processo de construção de veículos autônomos. O radar ultrassônico, por causa de seu meio de detecção fraco e robusto e alcance de detecção muito limitado, está destinado a ser incapaz de se tornar o núcleo do sistema de detecção.
Desta forma, "lidar + câmera" e "radar de onda milimétrica + câmera" são atualmente as duas soluções de fusão de sensores mais reconhecidas na indústria.
O radar de ondas milimétricas pode efetivamente compensar o problema de que os dados originais coletados pela câmera não possuem informações de valor de profundidade, que é a razão fundamental pela qual algumas montadoras escolhem essa solução. No entanto, a resolução do alvo do radar de ondas milimétricas é muito baixa e o tamanho e o contorno do alvo não podem ser determinados em algumas cenas. A fusão dos dois é mais como uma câmera "unidirecional" de radar de ondas milimétricas, em vez de uma realização mútua. Isso significa que a fusão de nível inferior e profunda não pode ser alcançada entre os dois e, mais frequentemente, eles só podem ser usados na forma de "fusão simplificada" para resolver alguns problemas de medição de velocidade do alvo ou rastreamento de trajetória.
Embora nos últimos anos, sob o impulso da inovação e progresso tecnológico, o radar de ondas milimétricas tenha repetidamente rompido o teto de desempenho de resolução e outros desempenhos, mas com ele surgem problemas como o alto preço de produtos de ponta e a aplicação prematura de aplicações em larga escala. O "radar de ondas milimétricas + câmera" tornou-se um "talvez o futuro possa ser visto, mas o presente não pode ser compreendido".
Lidar é aclamado como o "olho da direção autônoma" pela indústria. Somente em termos de desempenho de percepção, ele ocupa o primeiro lugar entre todos os tipos de sensores exigidos pelos sistemas de direção autônoma. O Lidar emite e recebe lasers de alta frequência para obter informações de localização, o que permite alcançar uma precisão de alcance extremamente alta e capacidades de interferência antiambientais. Comparado com outros sensores 3D, o alcance do lidar tem vantagens óbvias.
Pegue a série C-Fans de lidars de estado sólido na linha de produtos de navegação da Surestar: Esta série de produtos é o primeiro lidar doméstico montado na frente com um design específico para carro completo, com uma resolução de 0,1°x0,1° e uma gama completa de O campo de visão de varredura azimutal pode facilmente realizar monitoramento de área em larga escala e longa distância e fornecer um amplo campo de visão em cenas difíceis, como virar à esquerda desprotegido, etc., para cuidar de veículos ou pedestres à direita.
A taxa de quadros ultra-alta do nível da câmera esportiva dá a este lidar um poderoso campo de visão e a capacidade de capturar eventos anormais, seja detectando obstáculos ou sondas fantasmas, fusão de alta velocidade na estrada principal, súbita de alta velocidade cenas difíceis de frenagem e direção automática Tem um bom desempenho por baixo, que é mais adequado para ambientes de direção reais complexos, dinâmicos e de alta velocidade.
Embora o lidar seja um pouco inadequado na realização da percepção devido a fatores como o ângulo de lançamento de lasers de alta frequência, por exemplo, quando o lidar detecta objetos distantes, as informações do ponto de posição obtidas geralmente são esparsas. A diferença na refletividade dos lasers de alta frequência O material para distinguir os obstáculos é ligeiramente insuficiente no complexo ambiente de condução real. No entanto, a integração com a câmera é uma forma de complementar essas deficiências e elevar a percepção geral do sistema a um nível superior.
Sob a premissa de completar a calibração e sincronização do lidar e da câmera, a nuvem de pontos do lidar pode ser calibrada e projetada no plano de imagem da câmera para formar um mapa de profundidade relativamente esparso, mas muito preciso. Combinado com os resultados do processamento do algoritmo de imagem, o sistema autônomo de percepção de direção pode obter dados de informações de profundidade precisos e densos quase sem pontos cegos, suavizar a influência da nuvem de pontos local ligeiramente esparsa ao detectar alvos de longa distância e também pode passar a altura da câmera. A resolução da imagem da vida real aumenta a capacidade de distinguir diferentes obstáculos com posições semelhantes do mesmo material. Desta forma, a distância relativa, o perfil de posição e a velocidade de movimento dos obstáculos podem ser captados com precisão dentro de uma ampla faixa de detecção, e a robustez de todo o sistema de detecção é significativamente aprimorada.

Ao mesmo tempo, fabricantes nacionais e estrangeiros de LiDAR, como a Surestar, fizeram grandes progressos em chicotes elétricos de produtos LiDAR, miniaturização, conformidade de veículos e controle de custos nos últimos anos. Concluído e fortalecido os elos fracos no sistema de capacidade geral dos produtos lidar um por um, deixe a solução de fusão de sensor "lidar + câmera" ser capaz de atender às necessidades das montadoras e proprietários de automóveis para sistemas de percepção de direção autônoma neste estágio e em o futuro. Alcançar "firmemente baseado no presente e agarrar firmemente o futuro" também torna o trono do sensor essencial essencial do sistema de percepção do piloto automático lidar mais estável e de longo prazo.(www.isurestar.net)