
L'era dell'alto di gammaguida autonomaè davvero arrivato. Inconsapevolmente, i veicoli autonomi di livello L3 sul mercato hanno completato il salto "dal nulla al di più".
Da L2 a L3, il sistema di guida autonoma ha finalmente assunto l'importante compito di monitorare l'ambiente circostante il veicolo dal conducente. Anche l'importanza della capacità di percezione dei veicoli autonomi è stata portata a un livello senza precedenti.
Nel processo di esplorazione di capacità di percezione più forti, le nuove case automobilistiche e le case automobilistiche tradizionali hanno gradualmente raggiunto un consenso su quali sensori scegliere: solo mediante la fusione e l'applicazione di sensori è possibile soddisfare meglio le esigenze di percezione dei veicoli autonomi di fascia alta.
Percepisci la "formazione principale" di Self-driving
Di recente, il BMW Group ha annunciato che fornirà ai consumatori servizi di aggiornamento della capacità di guida autonoma L3 sotto forma di un "pacchetto di aggiornamento opzionale" sulla sua berlina serie 7. Anche dopo che le nuove forze della produzione automobilistica hanno rilasciato veicoli autonomi L3, anche le case automobilistiche tradizionali hanno iniziato a fare grandi passi avanti nell'evoluzione della guida autonoma.
Guardando i modelli a guida autonoma L3 che sono stati venduti o annunciati sul mercato, non è difficile scoprire che le attuali case automobilistiche sono molto coerenti nella configurazione dei sensori del sistema di percezione del veicolo a guida autonoma. Macchine fotografiche,lidar, radar a onde millimetriche e radar a ultrasuoni sono diventati "le uniche quattro scelte migliori" riconosciute dalle case automobilistiche.
Quindi, per i veicoli autonomi, quali sono le funzioni di questi quattro tipi di sensori e quali sono i loro vantaggi e svantaggi? Lascia che Xiaohui te lo spieghi uno per uno.
Telecamera
Tra i quattro tipi di sensori tradizionali, la fotocamera ha la tecnologia più matura, una gamma relativamente ampia di applicazioni e un costo relativamente basso. Allo stesso tempo, presenta vantaggi significativi in termini di risoluzione, uno dei parametri fondamentali nelle prestazioni percettive. Allo stato attuale, la risoluzione della telecamera montata sull'auto a guida autonoma che adotta la soluzione di percezione visiva può raggiungere generalmente i 1280x960 pixel. Equivale a monitorare e percepire l'ambiente circostante la carrozzeria del veicolo sotto forma di "trasmissione in diretta ad alta definizione".
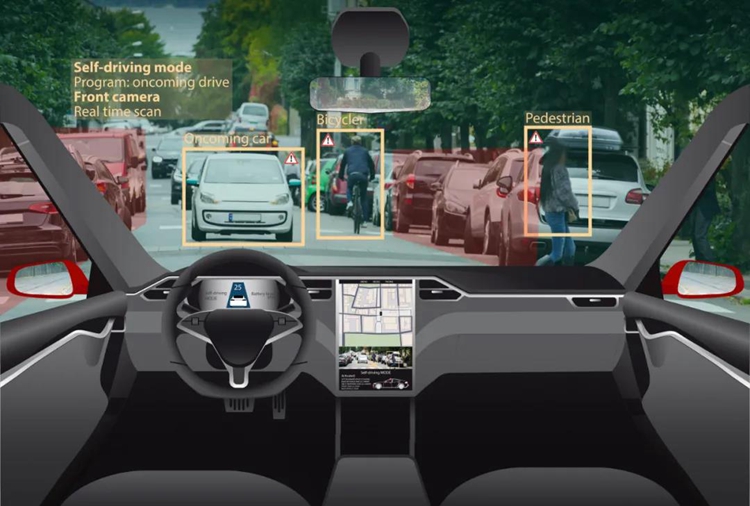
Con il supporto dell'algoritmo, la telecamera può anche realizzare la classificazione degli oggetti nell'area di rilevamento durante il processo di rilevamento
Nonostante i numerosi vantaggi, la telecamera non è in grado di "prendere l'iniziativa" nel sistema di percezione della guida autonoma. Ciò non è solo dovuto al suo campo visivo limitato, ma può concentrarsi solo su un campo visivo limitato. È anche perché i dati o l'immagine che ottiene sono bidimensionali, senza informazioni sul valore di profondità, e non possono riflettere con precisione la distanza relativa di diversi oggetti all'interno del campo di rilevamento. La fotocamera richiede il supporto di algoritmi complessi e altri tipi di applicazioni di fusione di sensori.
LiDAR
Lidar presenta vantaggi eccezionali come elevata precisione, lunga portata, buone prestazioni in tempo reale e una ricca raccolta di informazioni. Prendi lo stato solido ad altissima risoluzione a livello di immaginelidar C-Fans-256sviluppato da Surestar come esempio, questo LiDAR è in grado di catturare e percepire con precisione persone, automobili e oggetti a una distanza di 200 m e dispone di acquisizione dinamica a bassa latenza e capacità di riconoscimento della scala di grigi fine.
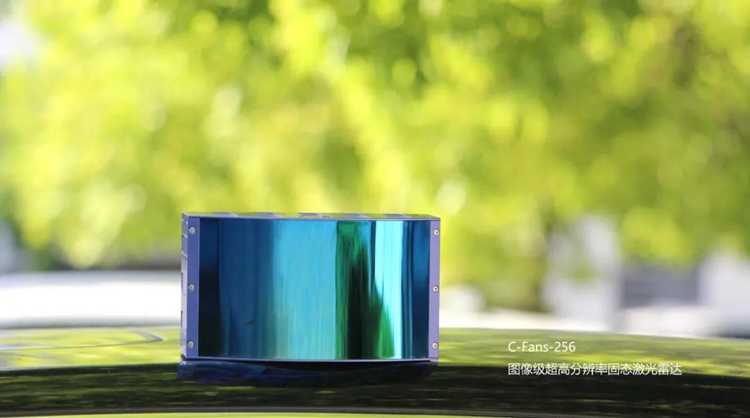
C-Fan-256
Da un punto di vista tecnico, lidar può anche essere definito il "perfetto sensore di guida autonoma". Tuttavia, nel lidar è integrato un gran numero di componenti optoelettronici di precisione e il livello tecnologico è molto elevato. L'attuale carenza di prodotti sul mercato che soddisfano gli standard delle normative automobilistiche ha influenzato in una certa misura l'entusiasmo delle case automobilistiche nell'utilizzare i prodotti lidar.
Radar a onde millimetriche
Anche il radar a onde millimetriche è una classe di sensori ambientali con una tecnologia relativamente matura e i suoi vantaggi in termini di prestazioni sono concentrati nelle due dimensioni della misurazione della velocità e della portata e della robustezza.

Struttura interna del radar ad onde millimetriche
Tuttavia, poiché l'onda millimetrica è significativamente influenzata dall'attenuazione e dall'assorbimento dell'atmosfera, non può eseguire una modellazione accurata e continua degli ostacoli nel processo dinamico di guida del veicolo. Di conseguenza, il radar a onde millimetriche può risolvere solo il problema di "vedere" ma non il problema di "vedere chiaramente" per il sistema automatico di percezione della guida.
Radar ultrasonico
Il radar a ultrasuoni utilizza le onde ultrasoniche come mezzo di rilevamento e calcola la posizione relativa e la distanza tra il veicolo e gli oggetti nell'area di misurazione calcolando la differenza di tempo tra l'invio e la ricezione di onde ultrasoniche, la precisione di rilevamento è estremamente elevata.
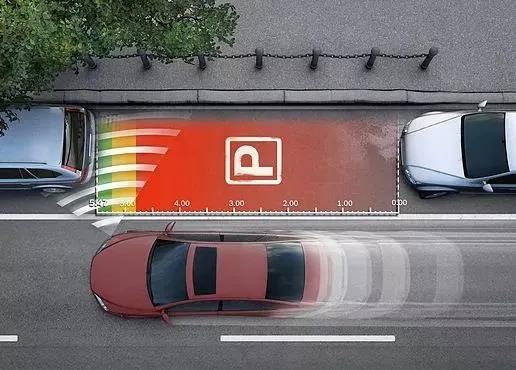
Principali scenari applicativi del radar ultrasonico: parcheggio automatico
Tuttavia, il raggio di rilevamento effettivo del radar a ultrasuoni è molto breve e la trasmissione e la ricezione delle onde ultrasoniche sono più sensibili alle condizioni meteorologiche rispetto alle onde millimetriche. In ambienti ad alta velocità, anche l'errore di portata degli ultrasuoni aumenterà a causa della bassa velocità del mezzo di rilevamento. Ciò rende i suoi scenari applicativi limitati a scenari a bassa velocità.
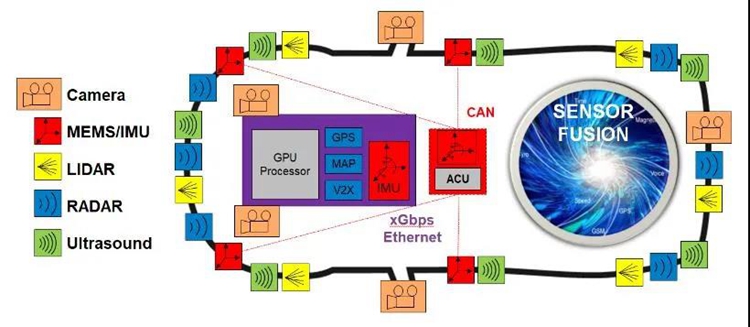
Qual è la migliore soluzione per la sensor fusion?
Quattro sensori mainstream con caratteristiche distintive e i rispettivi punti di forza costituiscono la "linea principale" del sistema di percezione della guida autonoma. Tuttavia, per ottenere una guida autonoma di alto livello, non è sufficiente affidarsi al semplice impilamento e giustapposizione di diversi sensori. Attraverso uno schema di fusione dei sensori chiaro, organico e unificato, la "reazione chimica" tra i sensori principali viene stimolata per ottenere prestazioni migliori. Le prestazioni percettive del veicolo a guida autonoma e il sensore ausiliario per integrare la capacità complessiva del sistema sono necessarie per creare un sistema di percezione del veicolo autonomo.
La fotocamera è conveniente e la tecnologia è matura. Sia dal punto di vista dei costi che della produzione, le case automobilistiche non hanno motivo di abbandonarlo nel processo di costruzione di veicoli a guida autonoma. Il radar a ultrasuoni, a causa del suo mezzo di rilevamento debole e robusto e del raggio di rilevamento molto limitato, è destinato a non poter diventare il cuore del sistema di rilevamento.
In questo modo, "lidar + telecamera" e "radar a onde millimetriche + telecamera" sono attualmente le due soluzioni di fusione di sensori più riconosciute nel settore.
Il radar a onde millimetriche può efficacemente sopperire al problema che i dati originali raccolti dalla telecamera non hanno informazioni sul valore di profondità, motivo fondamentale per cui alcune case automobilistiche scelgono questa soluzione. Tuttavia, la risoluzione del bersaglio del radar a onde millimetriche è molto bassa e in alcune scene non è nemmeno possibile determinare le dimensioni e il contorno del bersaglio. La fusione dei due è più simile a una telecamera "a senso unico" radar a onde millimetriche, piuttosto che a un risultato reciproco. Ciò significa che la fusione di livello inferiore e in profondità non può essere raggiunta tra i due e più spesso possono essere utilizzati solo sotto forma di "fusione semplificata" per risolvere alcuni problemi di misurazione della velocità del bersaglio o di tracciamento della traiettoria.
Sebbene negli ultimi anni, sotto l'impulso dell'innovazione tecnologica e del progresso, il radar a onde millimetriche abbia ripetutamente sfondato il limite delle prestazioni di risoluzione e altre prestazioni, ma con esso arrivano problemi come il prezzo elevato dei prodotti all'avanguardia e l'applicazione prematura di applicazioni su larga scala. Il "radar a onde millimetriche + telecamera" è diventato un "forse il futuro si vede, ma il presente non si afferra".
Lidar è salutato come "l'occhio della guida autonoma" dall'industria. Solo in termini di prestazioni di percezione, è al primo posto tra tutti i tipi di sensori richiesti dai sistemi di guida autonoma. Lidar emette e riceve laser ad alta frequenza per ottenere informazioni sulla posizione, che gli consentono di ottenere una precisione di portata estremamente elevata e capacità di interferenza anti-ambientale. Rispetto ad altri sensori 3D, la gamma di lidar presenta evidenti vantaggi.
Prendiamo la serie C-Fans di lidar a stato solido nella linea di prodotti di navigazione di Surestar: questa serie di prodotti è il primo lidar domestico montato frontalmente con un design completo specifico per auto, con una risoluzione di 0,1°x0,1° e una gamma completa di Il campo visivo di scansione azimutale può facilmente realizzare il monitoraggio di aree su larga scala ea lunga distanza e fornire un ampio campo visivo in scene difficili come la svolta a sinistra non protetta, ecc., in modo da prendersi cura dei veicoli o pedoni sulla destra.
L'altissima frequenza dei fotogrammi del livello della telecamera sportiva conferisce a questo lidar un potente campo visivo e la capacità di catturare eventi anomali, sia che si tratti di rilevare ostacoli o sonde fantasma, fusione ad alta velocità nella strada principale, improvvisi ad alta velocità scene difficili di frenata e guida automatica Ha una buona prestazione sottostante, che è più adatta per un ambiente di guida reale ad alta velocità, dinamico e complesso.
Sebbene il lidar sia leggermente inadeguato nella realizzazione della percezione a causa di fattori come l'angolo di lancio dei laser ad alta frequenza, ad esempio, quando il lidar rileva oggetti distanti, le informazioni sul punto di posizione ottenute sono spesso scarse. La differenza di riflettività del materiale laser ad alta frequenza per distinguere gli ostacoli è leggermente insufficiente nel complesso ambiente di guida reale. Tuttavia, l'integrazione con la telecamera è un modo per integrare queste carenze e portare la percezione complessiva del sistema a un livello superiore.
Con la premessa di completare la calibrazione e la sincronizzazione del lidar e della fotocamera, la nuvola di punti del lidar può essere calibrata e proiettata sul piano dell'immagine della fotocamera per formare una mappa di profondità relativamente scarsa ma molto accurata. In combinazione con i risultati dell'elaborazione dell'algoritmo delle immagini, il sistema di percezione della guida autonoma può ottenere dati di informazioni sulla profondità accurati e densi con quasi nessun punto cieco, attenuare l'influenza della nuvola di punti locale leggermente rada durante il rilevamento di bersagli a lunga distanza e può anche passare l'altezza della telecamera. La risoluzione dell'immagine reale migliora la capacità di distinguere diversi ostacoli con posizioni simili dello stesso materiale. In questo modo, la distanza relativa, il profilo di posizione e la velocità di spostamento degli ostacoli possono essere rilevati con precisione all'interno di un ampio campo di rilevamento e la robustezza dell'intero sistema di rilevamento viene notevolmente migliorata.

Allo stesso tempo, negli ultimi anni i produttori LiDAR nazionali ed esteri come Surestar hanno compiuto grandi progressi nel cablaggio dei prodotti LiDAR, nella miniaturizzazione, nella conformità dei veicoli e nel controllo dei costi. Completati e rafforzati uno per uno gli anelli deboli nel sistema di capacità complessivo dei prodotti lidar, lasciare che la soluzione di fusione dei sensori "lidar+camera" sia in grado di soddisfare le esigenze delle case automobilistiche e dei proprietari di auto per i sistemi di percezione della guida autonoma in questa fase e in il futuro. Il raggiungimento di "saldamente basato sul presente e afferrando fermamente il futuro" rende anche il trono del sensore essenziale centrale del sistema di percezione dell'autopilota lidar più stabile ea lungo termine.(www.isurestar.net)