
« Perception, prise de décision et exécution » parmi les trois éléments majeurs de la conduite autonome, la « perception » est sans aucun doute le plus important.
Si un véhicule autonome veut remplacer le conducteur pour reprendre la conduite du véhicule, il doit avoir une perception plus forte que les êtres humains. Si une perception précise ne peut être obtenue, la prise de décision et l'exécution sont impossibles. La réalisation d'une perception sûre, fiable et précise ne peut être réalisée par un seul produit ou une seule technologie.
À ce stade, les modèles de pilote automatique L3 sont produits en série et mis en vente, ce qui ouvre vraiment la porte au pilote automatique haut de gamme. Qu'il s'agisse de constructeurs automobiles, de fabricants de capteurs ou de géants de la technologie, ils pensent tous que seule l'application de la fusion de capteurs peut répondre aux besoins de perception des véhicules autonomes haut de gamme.
Aujourd'hui, Xiaohui invite tout le monde à découvrir quelle solution de fusion de capteurs est le meilleur choix pour la conduite autonome !
Pour obtenir une perception précise, vous ne pouvez pas compter sur un "combat unique"
L'importance des capteurs pour les voitures autonomes n'a pas besoin d'être répétée. Parmi les trois éléments majeurs de la conduite autonome, la perception est la base de la prise de décision et de l'exécution, et c'est aussi la pièce la plus critique du puzzle dans le processus de conduite autonome au sens plein de réalisation.
Cependant, la réalisation d'une perception sûre, fiable et précise ne peut être obtenue par un certain type de capteur seul. Comme le soi-disant "Parfois, un pied peut s'avérer court alors qu'un pouce peut s'avérer long", les capteurs grand public actuels ne sont pas les "guerriers hexagonaux" qui sont tout à fait capables d'effectuer seuls des tâches de détection de véhicules autonomes.
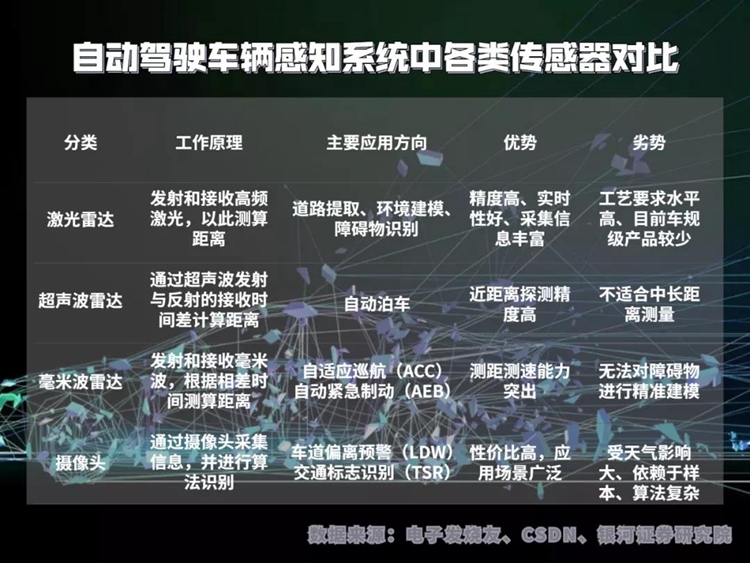
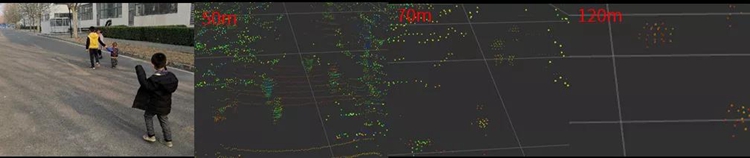
Lidarprésente des avantages exceptionnels tels qu'une grande précision, une mesure à longue portée, de bonnes performances en temps réel et une riche collection d'informations. Ces dernières années, elle a également fait de grands progrès en matière de câblage, de miniaturisation, de conformité à la réglementation automobile et de maîtrise des coûts. Cependant, lors de la détection d'objets distants, les informations de position obtenues par lidar sont souvent rares. S'appuyant sur la différence de réflectivité laser haute fréquence pour distinguer les obstacles des matériaux, il est légèrement insuffisant dans l'environnement de conduite réel complexe.
La technologie radar à ondes millimétriques est mature, mais comme l'onde millimétrique est considérablement affectée par l'atténuation et l'absorption de l'atmosphère, le radar à ondes millimétriques est incapable d'effectuer une modélisation précise et continue des obstacles dans le processus dynamique de conduite du véhicule.
Bien que la technologie de la caméra soit également très mature et ait une haute résolution, elle a un champ de vision limité et ne peut se concentrer que sur un champ de vision limité. De plus, les données ou les images qu'il obtient sont bidimensionnelles, sans informations sur la valeur de la profondeur, et ne peuvent pas refléter avec précision la distance relative des différents objets dans la plage de détection.

La caméra ne peut faire la mise au point que sur un champ de vision limité
La précision de détection des radars à ultrasons est extrêmement élevée, la distance de détection est très courte et la transmission et la réception des ondes ultrasonores sont plus sensibles aux conditions météorologiques que les ondes millimétriques. Dans un environnement à grande vitesse, l'erreur de télémétrie ultrasonique augmentera en raison de la faible vitesse du support de détection.
Bien qu'il y ait aussi des "fondamentalistes" comme Tesla, qui adhèrent toujours à la ligne de la perception visuelle pure. Mais dans l'ensemble, les solutions qui intègrent différents types de capteurs sont les plus populaires dans l'industrie de la conduite autonome.
La "réponse standard" pour la fusion de capteurs
Cependant, il est également assez difficile de mettre en œuvre des applications de fusion pour différents types de capteurs. Certains capteurs sont intrinsèquement difficiles à fusionner, et certaines fusions entre capteurs ne valent pas la peine.
Par exemple, entre les capteurs lidar et à ultrasons et les radars à ondes millimétriques, bien qu'ils détectent des milieux différents, leurs principes de fonctionnement sont similaires, et le lidar est de loin supérieur aux deux autres capteurs en termes de performances de détection.
Prenez C-Fans-256, le premier lidar à semi-conducteurs à 256 lignes au monde officiellement publié parSurestarIl n'y a pas si longtemps : les produits de la série C-Fans sont les premiers lidars domestiques montés à l'avant avec une conception complète de jauge de voiture en série. Le dernier produit en Chine, C-Fans-256 a une résolution de 0,1°x0,1°. Avec son champ de vision de balayage omnidirectionnel, il peut facilement réaliser une surveillance de zone à grande échelle et longue distance, et des véhicules autonomes tels que tourner à gauche sans protection Fournir un large champ de vision dans les scènes difficiles, afin de prendre soin des véhicules ou piétons à droite.
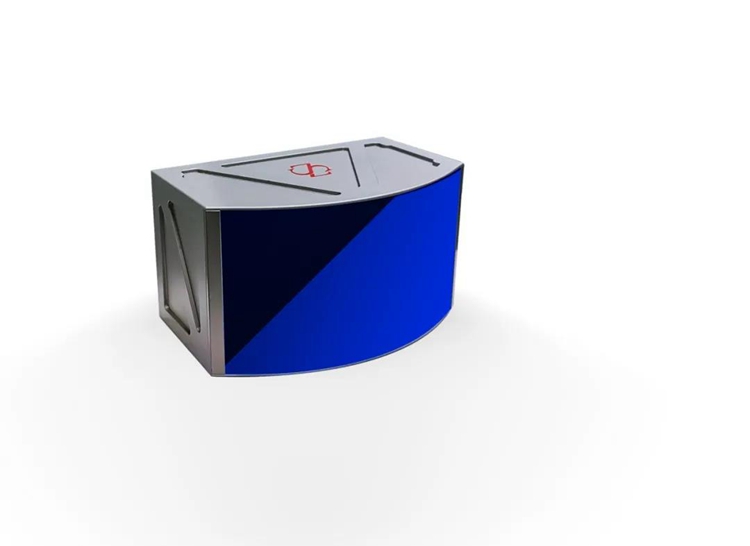
Le premier 256- au mondefaisceaulidar à semi-conducteurs de qualité automobile C-Fans-256
La fréquence d'images ultra-élevée du niveau de la caméra de sport confère à ce lidar un champ de vision puissant et la capacité de capturer des événements anormaux, qu'il s'agisse de détecter des obstacles ou des sondes fantômes, de se fondre à grande vitesse dans la route principale, à grande vitesse soudaine scènes difficiles de freinage et de conduite automatique. Il a une bonne performance en dessous, ce qui est plus adapté à un environnement de conduite réel à grande vitesse, dynamique et complexe.
À l'heure actuelle, le lidar évolué a été largement reconnu comme le capteur essentiel de base dans la conduite autonome avec ses performances complètes et exceptionnelles. Si les trois sont fusionnés, le résultat que nous obtenons est probablement "1 + 1 + 1 = 1", ce qui ne peut pas refléter les avantages des capteurs à ultrasons et des radars à ondes millimétriques.
Bien que le radar à ondes millimétriques puisse compenser efficacement le problème selon lequel les données d'origine collectées par la caméra ne contiennent pas d'informations sur la valeur de profondeur, la résolution cible du radar à ondes millimétriques est très faible et la taille et le contour de la cible ne peuvent même pas être déterminés. dans certains scénarios. Voir ". Cela rend impossible une intégration de bas niveau et approfondie entre les deux, et le plus souvent, ils ne peuvent être utilisés que sous la forme d '"intégration simplifiée" pour résoudre certains problèmes de mesure de vitesse cible ou de suivi de trajectoire.
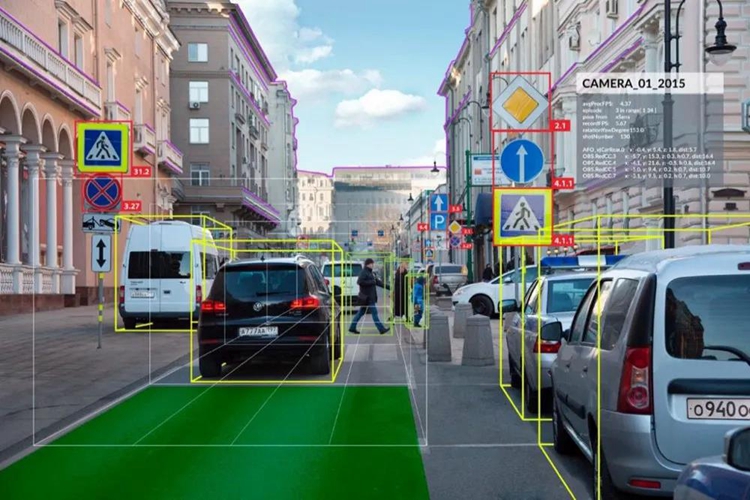
Qu'il s'agisse de la grande majorité des modèles de pilote automatique L3 actuellement sur le marché ou des solutions de pilote automatique de niveau supérieur qui ont été lancées, ils ont choisi une solution de perception basée sur "lidar + caméra" et assisté par d'autres capteurs environnementaux.
Un schéma de fusion actuel "lidar + caméra" grand public
Pourquoi parmi toutes sortes de capteurs, qu'il s'agisse de constructeurs automobiles ou de géants de la technologie, concentrent-ils tous leur attention sur le lidar et les caméras ?
En général, c'est parce que les deux peuvent être bien intégrés pour atteindre l'objectif ultime d'"apprendre des forces de l'autre", de sorte que le système de conduite autonome puisse réellement prendre le "long" et compenser tous les "courts". On peut l'appeler la "réponse standard" pour la fusion de capteurs dans les systèmes de perception de conduite autonome.
Lidar + caméra = futur
Lidar est salué comme «l'œil de la conduite autonome» par l'industrie. En termes de performances de perception uniquement, c'est le meilleur capteur de tous les types requis par un système de conduite autonome. Le lidar émet et reçoit des lasers haute fréquence pour obtenir des informations de position, ce qui lui permet d'atteindre une précision de portée extrêmement élevée et une résistance aux interférences environnementales. Par rapport aux autres capteurs 3D, la gamme de lidar présente des avantages évidents.
Lidar a d'excellentes capacités de détection
Le lidar à semi-conducteurs ultra-haute résolution au niveau de l'image C-Fans-256 développé parSurestarpeut capturer avec précision la position et les informations ponctuelles des véhicules et des piétons à une distance de 200 m, et peut identifier avec précision les obstacles cubiques d'une longueur de côté de 20 cm. La distance effective est également jusqu'à près de 60 m.
C-Fans-256 atteint également une consommation d'énergie inférieure à 16 W, et a une conformité élevée avec un total de 31 tests dans 9 catégories ISO16750, et peut fonctionner de manière stable et normale dans des environnements difficiles tels que le froid et la chaleur intenses, élevés. température et humidité, bosses accidentées, etc. . De plus, un autre produit de la même série, C-Fans-32, est actuellement le seul produit lidar à avoir passé la certification "sécurité intrinsèque".
En tant que capteur d'image qui existe depuis longtemps, l'appareil photo a un coût relativement faible. Non seulement la chaîne de l'industrie connexe, mais la caméra est également très mature dans la technologie. De plus, la caméra a une résolution élevée, et l'estimation des informations de profondeur dense à longue distance peut être obtenue grâce à un traitement algorithmique.
Application de la caméra dans la voiture sans conducteur
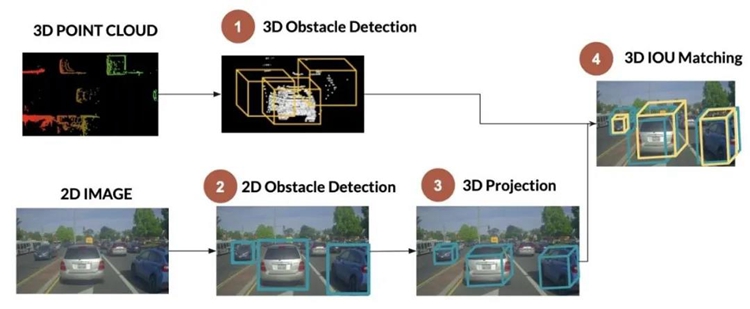
Sous le principe de terminer l'étalonnage et la synchronisation du lidar et de la caméra, le nuage de points du lidar peut être calibré et projeté sur le plan image de la caméra pour former une carte de profondeur relativement clairsemée mais très précise. Combiné avec les résultats de traitement de l'algorithme d'image, le système de perception de conduite autonome Il est possible d'obtenir des données d'informations de profondeur précises et denses avec presque aucune impasse, afin de réaliser une compréhension précise de la distance relative, du profil de position et de la vitesse de déplacement des obstacles dans une large plage de détection.
Pour le lidar, la caméra peut non seulement lisser l'influence du nuage de points local légèrement clairsemé lors de la détection de cibles longue distance, mais également améliorer la résolution de différents obstacles avec le même matériau et des positions similaires grâce à la scène réelle haute résolution de la caméra. image.
L'existence du lidar améliore considérablement le problème de la faible précision d'estimation de la profondeur de la caméra en tant que capteur de détection passif, et améliore considérablement la stabilité et la robustesse de l'ensemble du système de détection. La "réaction chimique" produite par la combinaison des deux permet aux performances du système de perception de la conduite autonome d'évoluer et d'atteindre une véritable perception précise.

Fusion lidar + caméra (source de données : jeu de données KITTI)
Bien que de nombreux problèmes attendent que les gens explorent des percées sur la voie de l'application du lidar et de la fusion de caméras, tels que "comment mieux projeter le nuage de points sur l'image", "comment s'assurer que la correspondance est vraie et efficace" , et "la précision du suivi des fonctionnalités" Comment continuer à s'améliorer" et ainsi de suite.
Cependant, comme les voitures autonomes L3 sont sur le marché les unes après les autres, aujourd'hui, alors que la piste lidar continue de prendre feu, non seulement les constructeurs automobiles, mais aussi les fabricants de lidar vétérans commeSurestar, qui ont été profondément impliqués dans la recherche et le développement de produits pendant plus de dix ans, ont également commencé une exploration approfondie de l'intégration du lidar et des caméras.Je pense qu'il ne faut pas longtemps pour "l'intégration parfaite" du LiDAR et de la caméra devenir une réalité. Rapprochons-nous d'un nouvel avenir où la conduite autonome est mature et populaire. (www.isurestar.net)