
"Orienté vers les résultats, parlant des faits" est la seule loi de la survie des entreprises.
Depuis que Surestar a lancé son activité de voitures intelligentes en réseau, elle s'est fixé comme objectif principal de développer des systèmes à semi-conducteurslidarsqui peut être pré-installé et produit en série. Peu importe à quel point le type mécanique à nombre de lignes élevé a été chaud, à quel point le concept OPA a été chaud et comment le laser à fibre est annoncé comme équivalent à des centaines de lignes, Surestar ne sera pas déplacé.
Surestar insiste sur le fait que le radar laser mécanique ne convient pas à la production de masse, que l'OPA ne peut pas sortir du laboratoire et que le laser à fibre est le plus approprié pour l'arpentage et la cartographie du radar laser. Ne suivant pas la mode ni les préférences de la capitale, Surestar a exercé seule dans le domaine deLidar.
En combinant les exigences de la réglementation des véhicules, des coûts et des scénarios, et en s'appuyant sur 21 ans d'accumulation dans le domaine du lidar, Surestar a surmonté de nombreux problèmes de structure optique et mécanique, d'émetteur-récepteur laser, de traitement du signal, de processus de fabrication, de puce, de lumière et de petite taille. taille, etc. , Création d'un lidar à semi-conducteurs à 256 lignes à faible coût basé sur la technologie des semi-conducteurs.
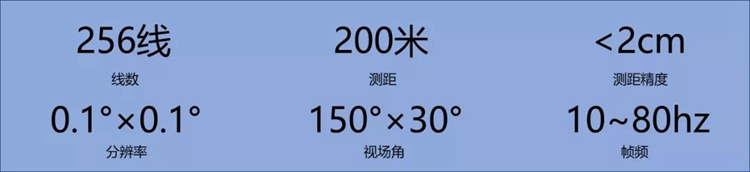
Paramètres principaux du C-Fans256
Comment C-Fans256 améliore la perception
Les véhicules sans pilote rencontreront une variété de conditions routières complexes en cours de conduite : véhicules occupant la route illégalement, embouteillages à courte distance, véhicules roulant contre le code de la route, véhicules électriques rétrogrades, sondes fantômes, virage à gauche non protégé, vélos traversant la route, cônes de signalisation ou panneaux d'avertissement pour constructions temporaires, tunnels, sous-sols, autoroutes, etc.
Différentes zones ont des caractéristiques routières différentes. Les villes du sud sont pluvieuses et les routes sont sujettes à l'humidité, et il y a plus de motos qui ne respectent pas le code de la route. La rocade intérieure de Pékin a des routes larges, des véhicules denses et des vitesses plus rapides.
Le module de perception riche et stable est l'avant-garde du système de conduite sans pilote. Il fournit des données d'entrée pour une prise de décision et une planification fines. C-Fans256 a mené des enquêtes approfondies sur divers scénarios au début de la conception, afin d'aider à résoudre divers cas critiques et d'améliorer la capacité de perception du système de conduite humaine a créé un certain nombre d'armes secrètes.
C-Fans256, haute résolution (0,1°×0,1°)

En train de conduire sur les autoroutes urbaines, les piétons qui ne respectent pas les règles de circulation au loin et les véhicules qui reculent accidentellement sur l'autoroute, etc., le lidar haute résolution peut résoudre divers problèmes rencontrés par les radars et caméras à ondes millimétriques. détection, fournir une entrée perceptuelle stable pour le système de planification de décision.
Les données en temps réel du lidar en dessous de 100 lignes sont un nuage de points clairsemé, mais avec sa résolution ultra-élevée de 0,1° × 0,1°, la ligne C-Fans256 peut toujours atteindre une densité de grille de 0,4 m × 0,4 m à 200 m. Pour un SUV ordinaire d'une largeur de 1,8 m et d'une hauteur de 1,8 m, une matrice de points 4 × 4 peut toujours être vue à 200 m.
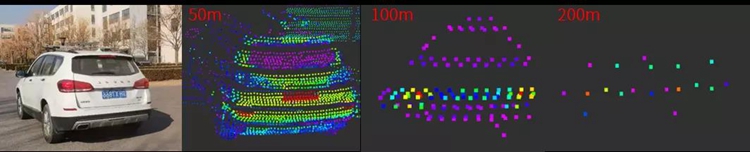
Nuage de points mesuré par le véhicule C-Fans256
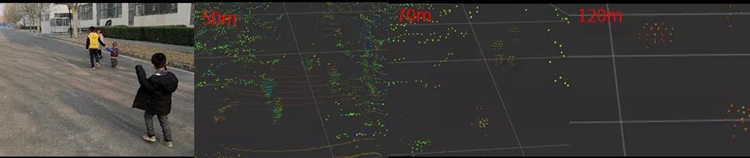
Nuage de points mesuré C-Fans256 pour les enfants (taille <1,1 m)

C-Fans256 a mesuré le nuage de points de petits obstacles (20cm×20cm×20cm)
La haute résolution correspond à la densité de grille élevée, qui peut réaliser la détection d'obstacles plus éloignés et plus petits. Dans les conditions routières complexes de la ville, les détails des changements lointains peuvent être trouvés le plus tôt possible. À grande vitesse, les actions ou les anomalies des véhicules éloignés peuvent être détectées à l'avance. Une telle capacité de détection signifie une plus grande sécurité.
C-Fans256, grand champ de vision (150°×30°)
Dans la scène des virages à gauche non protégés aux intersections et aux intersections complexes dans les zones urbaines, un grand FOV peut apporter des informations de perception riches aux véhicules autonomes, en particulier lors de l'exécution de mouvements de demi-tour, plus le champ de vision est large, mieux c'est, fourni par C- Ventilateurs256 Avec un champ de vision de 150° × 30°, il peut fournir une large plage de détection lorsque le véhicule tourne à gauche ou fait demi-tour, et améliore la sécurité du système de conduite automatique.
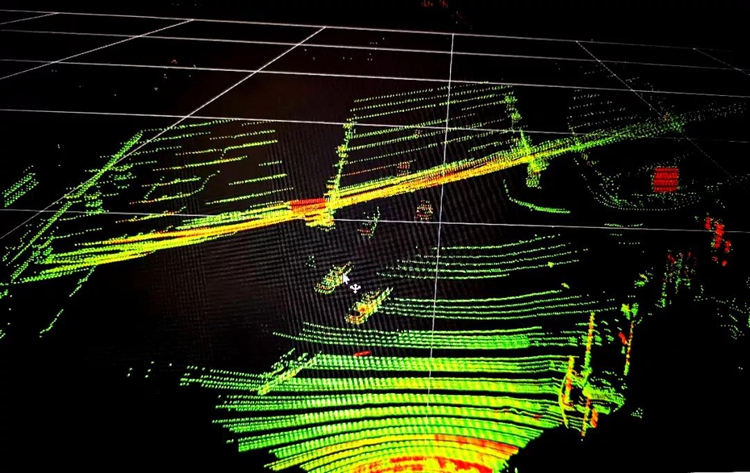
Nuage de points C-Fans256
C-Fans256, fréquence d'images élevée (80Hz)
Dans des scènes telles que des sondes fantômes, une fusion à grande vitesse avec la route principale, un freinage soudain à grande vitesse, etc., la capacité de mesure de contour directe précise et rapide du lidar peut aider les véhicules autonomes à réagir en moins de 100 millisecondes. L'indicateur clé à ce moment est la fréquence d'images. Si une sonde fantôme ou une voiture qui freine brusquement, la vitesse relative est de 80km/h. Si la fréquence d'images radar est de 10 Hz, l'algorithme de suivi a terminé le calcul en 5 images, ce qui signifie la réponse du véhicule. La distance est de :
Depuis le moment de l'accident jusqu'au début de l'arrêt du système, la distance relative entre les deux a été raccourcie de 6,7 m, puis la distance de freinage du véhicule est incluse, ce qui signifie évidemment une augmentation du facteur de risque.

Distance de réponse du véhicule sous différentes fréquences d'images (80 km/h)
C'est l'une des principales raisons pour lesquelles la plupart des véhicules autonomes fonctionnent à ce stade dans des scénarios de vitesse faible à moyenne et de faible dynamique. Afin d'améliorer autant que possible la capacité de perception du système de conduite autonome, C-Fans256 a augmenté sa fréquence d'images à 80 Hz, ce qui est sans précédent dans l'industrie, espère contribuer à la réalisation de la conduite sans pilote à grande vitesse, environnements hautement dynamiques et complexes.
80 Hz capturent des objets à grande vitesse tombant dans les airs (lecture 0,3x)
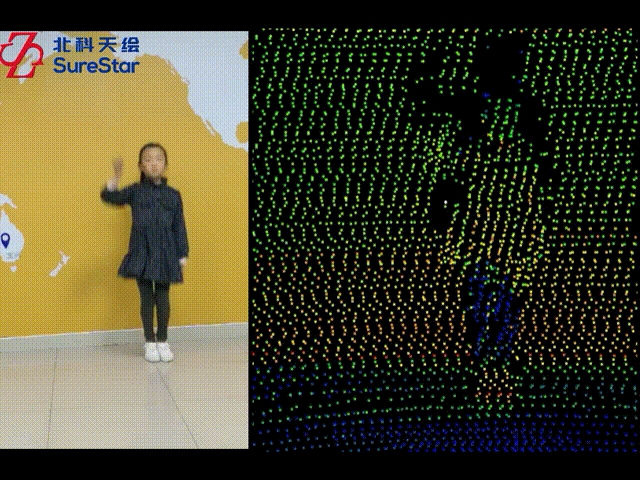
Utilisez 80 Hz pour capturer la danse dynamique de la petite fille (nom de la danse : potins du fils prodigue)
La fréquence d'images élevée de 80 Hz apporte une détection dynamique fluide et rapide. Dans un environnement de trafic réel, le temps de détection dynamique des véhicules sans pilote peut être raccourci de l'ordre de centaines de millisecondes à l'ordre de dix millisecondes, apportant ainsi une sécurité accrue.
Bonne reconnaissance des niveaux de gris
La bibliothèque de scènes L2 doit être un sous-ensemble de la bibliothèque de scènes L3, comme l'assistance au centrage de voie LCC, l'assistance au changement de voie automatique ALC, la croisière adaptative à pleine vitesse ACC, la croisière adaptative en courbe ATC, le départ de voie LDW, etc. L'utilisation du lidar peut améliorer la conduite automatique Robustesse du système de nuit, entrées et sorties de tunnel, etc.
Ces scènes reposent principalement sur la détection précise par le capteur des lignes de voie et des accotements de la route, ce qui met en avant des exigences pour le niveau de reconnaissance des niveaux de gris du lidar, qui nécessite une reconnaissance précise et précise des niveaux de gris.
C-Fans256 fournit une résolution en niveaux de gris de 8 bits, qui peut réaliser une reconnaissance claire des lignes de voie par tous les temps et améliorer la capacité de perception nocturne du système de conduite sans pilote.

Effet de reconnaissance de ligne de voie la nuit
Conformez-vous aux réglementations automobiles, aux puces auto-développées, à la chaîne d'approvisionnement indépendante et contrôlable
Surestar a obtenu trois certifications de système majeures : IATF 16949, ISO9001 et ISO 14001. Et se référant aux exigences spécifiques de la norme ISO 16750 et de plusieurs constructeurs automobiles nationaux et étrangers pour nous, un certain nombre de tests de conformité des véhicules ont été effectués dans des tiers. laboratoires. À l'heure actuelle, l'annonce officielle du projet désigné de pré-installation C-Fans256 est en cours, veuillez vous attendre.

Conformité du véhicule
Le Lidar est une technologie clé dans le domaine des capteurs de conduite autonome. Dans la situation internationale actuelle, les fabricants de Lidar qui ont d'excellentes performances, stabilité et fiabilité de produit, et qui peuvent localiser tous les composants clés sont particulièrement rares. Après 21 ans d'accumulation à long terme, Surestar a rempli à plusieurs reprises le vide national dans le domaine des applications de radar laser et a réalisé la contrôlabilité indépendante entièrement nationale du radar laser de mesure. Le prix du lidar de mesure est passé des dizaines de millions d'équipements importés au niveau de 100 000, et par conséquent, il a remporté à plusieurs reprises le prix spécial et le premier prix du progrès scientifique et technologique provincial et ministériel.
Avec une accumulation profonde, Surestar a réalisé la chipisation du module central du traitement du signal radar laser. Jusqu'à présent, il a terminé la conception indépendante de 24 puces dans 5 catégories et réalisé le contrôle indépendant complet des composants de base du radar laser.

Des objectifs élevés et terre-à-terre sont les principes de Surestar. Depuis plus de 20 ans, Surestar avance tranquillement sur la voie de la localisation de lidar. Cette route est peu peuplée, avec des épines et de longues routes. Les amis de Surestar continuent d'innover, peaufinent les produits, ne créent pas délibérément de sujets et ne recherchent pas les fleurs et l'attention à court terme. C'est probablement la différence essentielle entre Surestar et la nouvelle société lidar qui chasse le vent.(www.isurestar.net)