
L'ère du haut de gammeconduite autonomeest vraiment venu. Sans le savoir, les véhicules autonomes de niveau L3 sur le marché ont franchi le pas "de rien à plus".
De L2 à L3, le système de conduite autonome a finalement repris la tâche importante de surveiller l'environnement du véhicule depuis le conducteur. L'importance de la capacité de perception des véhicules autonomes a également été portée à une hauteur sans précédent.
Dans le processus d'exploration de capacités de perception plus fortes, les nouveaux constructeurs automobiles et les constructeurs automobiles traditionnels sont progressivement parvenus à un consensus sur les capteurs à choisir : ce n'est que par la fusion et l'application de capteurs que les besoins de perception des véhicules autonomes haut de gamme peuvent être mieux satisfaits.
Percevez la "gamme principale" de l'auto-conduite
Récemment, le groupe BMW a annoncé qu'il fournirait aux consommateurs des services de mise à niveau de la capacité de conduite autonome L3 sous la forme d'un « ensemble de mise à niveau en option » sur sa berline de série 7. Même après que les nouvelles forces de l'industrie automobile ont lancé les véhicules autonomes L3, les constructeurs automobiles traditionnels ont également commencé à faire de grands progrès dans l'évolution de la conduite autonome.
En regardant les modèles de conduite autonome L3 qui ont été vendus ou annoncés sur le marché, il n'est pas difficile de constater que les constructeurs automobiles actuels sont très cohérents dans la configuration des capteurs du système de perception des véhicules autonomes. Appareils photo,lidars, les radars à ondes millimétriques et les radars à ultrasons sont devenus "les quatre seuls meilleurs choix" reconnus par les constructeurs automobiles.
Alors, pour les véhicules autonomes, quelles sont les fonctions de ces quatre types de capteurs, et quels sont leurs avantages et inconvénients ? Laissez Xiaohui vous l'expliquer un par un.
Caméra
Parmi les quatre types de capteurs grand public, la caméra possède la technologie la plus mature, une gamme d'applications relativement large et un coût relativement faible. Dans le même temps, il présente des avantages significatifs en termes de résolution, l'un des paramètres essentiels des performances perceptuelles. À l'heure actuelle, la résolution de la caméra montée sur la voiture autonome qui adopte la solution de perception visuelle peut généralement atteindre 1280x960 pixels. Cela équivaut à surveiller et à percevoir l'environnement environnant de la carrosserie du véhicule sous la forme d'une "diffusion en direct haute définition".
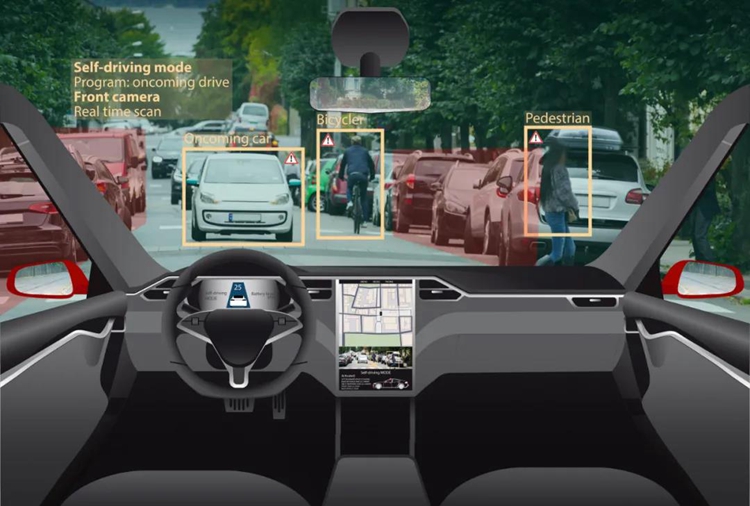
Avec le support de l'algorithme, la caméra peut également réaliser la classification des objets dans la zone d'enquête pendant le processus de détection
Malgré tant d'avantages, la caméra est incapable de « prendre les devants » dans le système de perception de la conduite autonome. Ce n'est pas seulement dû à son champ de vision limité, il ne peut se concentrer que sur un champ de vision limité. C'est également parce que les données ou l'image qu'il obtient sont bidimensionnelles, sans informations sur la valeur de la profondeur, et ne peuvent pas refléter avec précision la distance relative des différents objets dans la plage de détection. La caméra nécessite une prise en charge d'algorithmes complexes et d'autres types d'applications de fusion de capteurs.
LiDAR
Lidar présente des avantages exceptionnels tels qu'une grande précision, une longue portée, de bonnes performances en temps réel et une riche collection d'informations. Prenez l'état solide ultra-haute résolution au niveau de l'imagelidar C-Fans-256développé par Surestar à titre d'exemple, ce LiDAR peut capturer et percevoir avec précision des personnes, des voitures et des objets à une distance de 200 m, et dispose de capacités de capture dynamique à faible latence et de reconnaissance fine des niveaux de gris.
C-Fans-256
D'un point de vue technique, le lidar peut même être qualifié de "capteur de conduite autonome parfait". Cependant, un grand nombre de composants optoélectroniques de précision sont intégrés dans le lidar, et le niveau technologique est très élevé. La pénurie actuelle de produits sur le marché qui répondent aux normes de la réglementation automobile a affecté dans une certaine mesure l'enthousiasme des constructeurs automobiles à utiliser les produits lidar.
Radar à ondes millimétriques
Le radar à ondes millimétriques est également une classe de capteurs environnementaux avec une technologie relativement mature, et ses avantages de performance sont concentrés dans les deux dimensions de mesure de vitesse et de distance et de robustesse.

Structure interne du radar à ondes millimétriques
Cependant, étant donné que l'onde millimétrique est considérablement affectée par l'atténuation et l'absorption de l'atmosphère, elle ne peut pas effectuer une modélisation précise et continue des obstacles dans le processus dynamique de conduite du véhicule. Par conséquent, le radar à ondes millimétriques ne peut résoudre que le problème de "voir" mais pas le problème de "voir clairement" pour le système de perception automatique de la conduite.
Radar à ultrasons
Le radar à ultrasons utilise des ondes ultrasonores comme support de détection et calcule la position et la distance relatives entre le véhicule et les objets dans la zone de mesure en calculant la différence de temps entre l'envoi et la réception d'ondes ultrasonores, la précision de détection est extrêmement élevée.
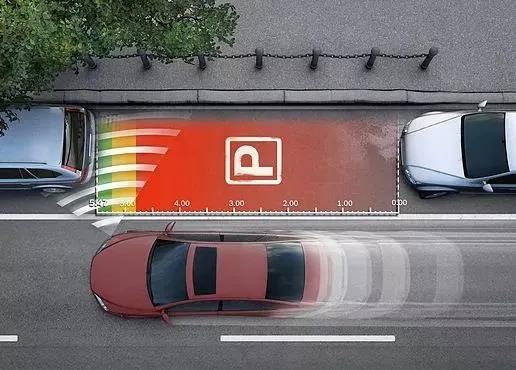
Principaux scénarios d'application du radar à ultrasons : stationnement automatique
Cependant, la portée de détection effective du radar à ultrasons est très courte et la transmission et la réception des ondes ultrasonores sont plus sensibles aux conditions météorologiques que les ondes millimétriques. Dans les environnements à grande vitesse, l'erreur de télémétrie ultrasonique augmentera également en raison de la faible vitesse du support de détection. Cela limite ses scénarios d'application aux scénarios à faible vitesse.
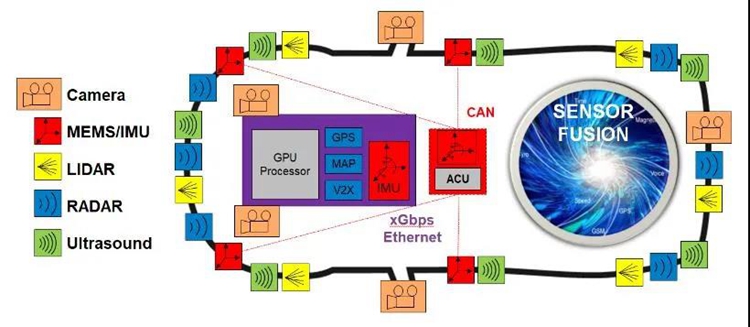
Quelle est la meilleure solution pour Fusion de capteurs?
Quatre capteurs grand public dotés de caractéristiques distinctives et de leurs atouts respectifs forment la «gamme principale» du système de perception de la conduite autonome. Cependant, pour atteindre une conduite autonome de haut niveau, il ne suffit pas de s'appuyer sur un simple empilement et juxtaposition de différents capteurs. Grâce à un schéma de fusion de capteurs clair, organique et unifié, la "réaction chimique" entre les capteurs centraux est stimulée pour obtenir de meilleures performances. Les performances de perception du véhicule autonome et le capteur auxiliaire pour compléter la capacité globale du système sont nécessaires pour créer un système de perception de véhicule autonome.
La caméra est rentable et la technologie est mature. Que ce soit du point de vue des coûts ou de la production, les constructeurs automobiles n'ont aucune raison de l'abandonner dans le processus de construction de véhicules autonomes. Le radar à ultrasons, en raison de son support de détection faible et robuste et de sa portée de détection très limitée, est destiné à ne pas pouvoir devenir le cœur du système de détection.
Ainsi, "lidar + caméra" et "radar à ondes millimétriques + caméra" sont actuellement les deux solutions de fusion de capteurs les plus reconnues dans l'industrie.
Le radar à ondes millimétriques peut efficacement compenser le problème que les données d'origine collectées par la caméra ne contiennent pas d'informations sur la valeur de la profondeur, ce qui est la raison fondamentale pour laquelle certains constructeurs automobiles choisissent cette solution. Cependant, la résolution cible du radar à ondes millimétriques est très faible, et la taille et le contour de la cible ne peuvent même pas être déterminés dans certaines scènes. La fusion des deux ressemble plus à une caméra radar à ondes millimétriques "à sens unique", plutôt qu'à une réalisation mutuelle. Cela signifie que la fusion de bas niveau et en profondeur ne peut être réalisée entre les deux, et le plus souvent elles ne peuvent être utilisées que sous forme de "fusion simplifiée" pour résoudre certains problèmes de mesure de vitesse cible ou de suivi de trajectoire.
Bien que ces dernières années, sous l'impulsion de l'innovation et du progrès technologiques, le radar à ondes millimétriques ait franchi à plusieurs reprises le plafond de performance de résolution et d'autres performances, mais il s'accompagne de problèmes tels que le prix élevé des produits de pointe et l'application prématurée d'applications à grande échelle. Le "radar à ondes millimétriques + caméra" est devenu un "peut-être que l'avenir peut être vu, mais le présent ne peut pas être saisi".
Lidar est salué comme "l'œil de la conduite autonome" par l'industrie. En termes de performances de perception uniquement, il se classe premier parmi tous les types de capteurs requis par les systèmes de conduite autonome. Lidar émet et reçoit des lasers à haute fréquence pour obtenir des informations de localisation, ce qui lui permet d'atteindre une précision de portée extrêmement élevée et des capacités d'interférence anti-environnementales. Par rapport aux autres capteurs 3D, la gamme de lidar présente des avantages évidents.
Prenez la série C-Fans de lidars à semi-conducteurs dans la gamme de produits de navigation de Surestar : Cette série de produits est le premier lidar domestique monté à l'avant avec une conception complète spécifique à la voiture, avec une résolution de 0,1°x0,1° et une gamme complète de Le champ de vision de balayage azimutal peut facilement réaliser une surveillance de zone à grande échelle et longue distance, et fournir un large champ de vision dans des scènes difficiles telles que des virages à gauche non protégés, etc., afin de prendre soin des véhicules ou piétons à droite.
La fréquence d'images ultra-élevée du niveau de la caméra de sport confère à ce lidar un champ de vision puissant et la capacité de capturer des événements anormaux, qu'il s'agisse de détecter des obstacles ou des sondes fantômes, de fusionner à grande vitesse dans la route principale, à grande vitesse soudaine scènes difficiles de freinage et de conduite automatique Il a une bonne performance en dessous, ce qui est plus adapté à un environnement de conduite réel à grande vitesse, dynamique et complexe.
Bien que le lidar soit légèrement inadéquat dans la réalisation de la perception en raison de facteurs tels que l'angle de lancement des lasers à haute fréquence, par exemple, lorsque le lidar détecte des objets distants, les informations de point de position obtenues sont souvent rares. La différence de réflectivité des lasers haute fréquence Le matériau permettant de distinguer les obstacles est légèrement insuffisant dans l'environnement de conduite réel complexe. Cependant, l'intégration avec la caméra est un moyen de combler ces lacunes et d'amener la perception globale du système à un niveau supérieur.
Sous réserve de terminer l'étalonnage et la synchronisation du lidar et de la caméra, le nuage de points du lidar peut être calibré et projeté sur le plan image de la caméra pour former une carte de profondeur relativement clairsemée mais très précise. Combiné avec les résultats du traitement de l'algorithme d'image, le système de perception de conduite autonome peut obtenir des données d'informations de profondeur précises et denses avec presque aucun angle mort, lisser l'influence du nuage de points local légèrement clairsemé lors de la détection de cibles longue distance, et peut également passer la hauteur de la caméra. La résolution de l'image réelle améliore la capacité de distinguer différents obstacles avec des positions similaires du même matériau. De cette manière, la distance relative, le profil de position et la vitesse de déplacement des obstacles peuvent être saisis avec précision dans une large plage de détection, et la robustesse de l'ensemble du système de détection est considérablement améliorée.

Dans le même temps, les fabricants nationaux et étrangers de LiDAR tels que Surestar ont fait de grands progrès dans le faisceau de câblage des produits LiDAR, la miniaturisation, la conformité des véhicules et le contrôle des coûts ces dernières années. Complété et renforcé les maillons faibles du système de capacité global des produits lidar un par un, laissez la solution de fusion de capteurs "lidar + caméra" être en mesure de répondre aux besoins des constructeurs automobiles et des propriétaires de voitures pour les systèmes de perception de conduite autonome à ce stade et dans l'avenir. Atteindre "fermement basé sur le présent et saisir fermement l'avenir" rend également le trône du capteur essentiel central du système de perception du pilote automatique lidar plus stable et à long terme.(www.isurestar.net)