
En la búsqueda de "más pequeños", ¿los dispositivos portátiles comprometerán el rendimiento?
La respuesta de Surestar es: "¡En absoluto!"
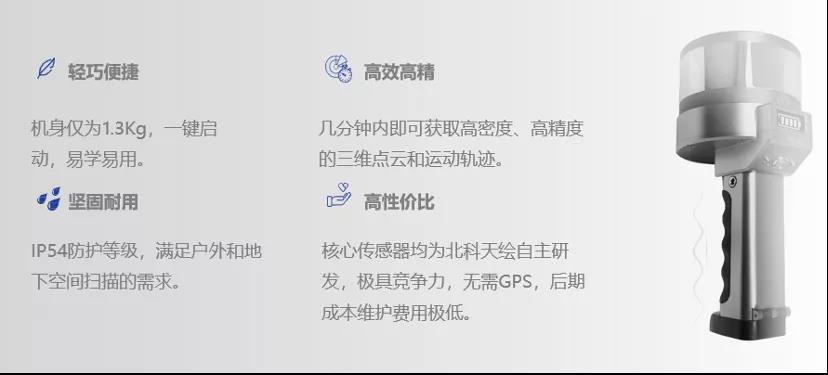
Esta primavera, Surestar lanzó el primer autodesarrolladoLiDAR 3D de mano- "StarScan", que no solo es muy compacto y pesa menos de 1,3 kg, sino que también tiene una gran "potencia interna".
El nuevo algoritmo SLAM de alta precisión utilizado por el explorador le permite completar tareas topográficas y cartográficas de manera eficiente y con alta calidad en una variedad de escenarios, lo que puede llamarse la "polaroid" de la industria topográfica y cartográfica.
¡Hoy, permita que Xiaohui lleve a todos al "cerebro más poderoso" del pequeño algoritmo SLAM "explorador" y vea cómo puede jugar con la medición 3D!
SLAM (Simultaneous Localization And Mapping) significa posicionamiento y mapeo síncronos. Parece ser un concepto técnico particularmente profesional y difícil, pero de hecho, no es complicado de entender SLAM.
Por ejemplo, el proceso de visitar un parque o exposición por primera vez se puede dividir aproximadamente en los siguientes cinco pasos:
1. Ver y recordar los marcadores en su entorno;
2. Con base en la información que ven los ojos, use la ubicación del marcador en su mente para construir un "mapa";
3. A medida que cambia la propia posición, vea y recuerde constantemente nuevos puntos de referencia, amplíe el alcance del "mapa" y modifique los detalles al mismo tiempo;
4. Determine su posición actual en el parque o sala de exposiciones de acuerdo con el "mapa" que amplía el alcance y corrige los detalles en su cerebro;
5. Después de caminar un rato, al comparar el "mapa" en su mente con las cosas que ve en ese momento, puede confirmar si ha estado en este lugar antes y si ha ido por el mismo camino.
El principio de SLAM es en realidad muy similar al proceso descrito anteriormente, excepto que lo completan máquinas y equipos, en lugar de "personas vivas". SLAM generalmente incluye las siguientes partes, extracción de características, asociación de datos, estimación de estado, actualización de estado y actualización de características. En términos sencillos, "abre el mapa mientras caminas", de forma similar a como jugamos juegos de estrategia en tiempo real.

Al igual que los juegos RTS, donde va la persona o el dispositivo, va la "vista".
Desde la perspectiva de los escenarios de aplicación práctica, el robot de barrido es la aplicación SLAM más típica y relativamente simple más cercana a nuestra vida cotidiana. El robot de barrido planifica automáticamente la ruta de limpieza, apoyándose en la tecnología SLAM, lo que le permite "dominar" el "mapa panorámico" del suelo de la habitación.
Es precisamente debido a su nuevo algoritmo SLAM de alta precisión que el "StarScan" desarrollado de forma independiente por Surestar puede completar operaciones de manera eficiente durante el movimiento. Los equipos de exploración topográfica y cartográfica, como el lidar equipado con algoritmos SLAM, pueden llamarse la "polaroid" de la industria topográfica y cartográfica.
Satisfacer la demanda de operaciones eficientes en movimiento es solo el primer nivel de desempeño de la fuerza de "exploración". A través del algoritmo SLAM, la "exploración" puede completar operaciones topográficas y cartográficas en áreas complejas como subterráneas, interiores, túneles, etc., obtener datos de nube de puntos de alta densidad y alta precisión y lograr un cierre perfecto.
Esto se debe a que el mapa construido por el algoritmo SLAM es un "mapa completo", es decir, todos los rincones del área de trabajo se pueden percibir sin obstáculos, independientemente de su tamaño. Ya sea que se trate de un entorno de estructura espacial estrecho, tortuoso o complejo, la "exploración" puede lograr una gama completa de percepción precisa en el área de operación, "sin dejar de lado ninguna pista".
Nube de puntos de garaje subterráneo "Star Scout": completa y detallada
Gracias al algoritmo SLAM, la "exploración" no necesita depender completamente del posicionamiento satelital durante las operaciones. En el proceso de escaneo de área cerrada, incluso si no hay señal de GPS, la "exploración" puede lograr fácilmente una coincidencia precisa de la nube de puntos.
Al igual que cuando las personas determinan su propia ubicación, la mayoría de las personas no abren la aplicación de mapas para ver la ubicación. En un área fija, ya sea un cerebro humano o el algoritmo SLAM de un explorador, puede confiar en la "memoria" para confirmar su ubicación, sin necesidad de buscar la ayuda del posicionamiento satelital en todo momento.
"StarScan" tiene un alcance tridimensional central de 200 m, un campo de visión de exploración de 360°x30° y una frecuencia de pulso de 320.000 puntos por segundo. Un área de trabajo de 5000 m², desde la recopilación de datos hasta el procesamiento de datos, solo toma 10 minutos para completar el trabajo.
En el proceso de diseño y desarrollo de "StarScan",Surestar llevó a cabo experimentos masivos de recolección de datos para optimizar continuamente el algoritmo del modelo de error. Finalmente, estoLiDAR portátil de alta precisiónlogró una precisión de datos absoluta a nivel centimétrico.
Junto con su espesor de nube de puntos de menos de 5 cm, admite conjuntamente la "exploración" para obtener capacidades de medición de trayectoria de movimiento y nube de puntos tridimensionales de alta densidad y alta precisión, de modo que todos los detalles en el área objetivo de la operación son detallados.
Los detalles de la nube de puntos de construcción antigua "Star Scout" como aleros y pilares se pueden reproducir con precisión
Además de excelentes parámetros topográficos y cartográficos básicos, el cuerpo pequeño del explorador también integra muchas tecnologías que pueden mejorar el rendimiento topográfico y cartográfico. Por ejemplo, el sistema de navegación inercial de 9 grados de libertad permite a los exploradores lograr una medición precisa y una operación libre incluso cuando el suelo es ondulado, la posición de trabajo o el objetivo tiene un ángulo de inclinación.
Además, el "StarScan" también utiliza tecnología de compensación de inclinación, admite la corrección automática de ±10° horizontal y puede recopilar datos desde múltiples ángulos y todas las direcciones. Por ejemplo, al escanear postes de energía, torres y fachadas de edificios de gran altura, el personal de topografía y mapeo en el terreno puede usar "exploración" para obtener fácilmente datos completos de nubes de puntos en 3D e información relacionada.
Con árboles de unos pocos metros de altura y edificios de decenas de metros de altura, los "scouters" pueden obtener con precisión nubes de puntos
"Study" también admite operaciones a una velocidad de movimiento de 2 m/s. Para vehículos e incluso humanos, esta velocidad puede parecer muy lenta, pero en el proceso de topografía y mapeo, especialmente cuando se usan dispositivos portátiles para topografía y mapeo, 2 m/s puede llamarse "movimiento rápido".
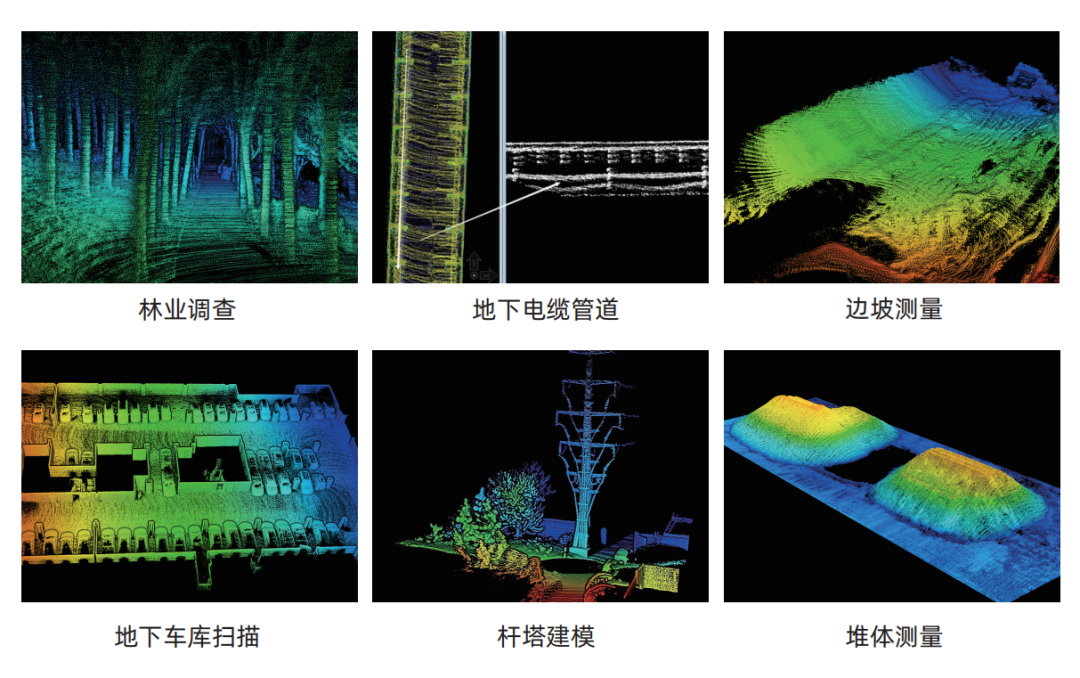
Con la bendición conjunta del algoritmo SLAM y muchas tecnologías, la "exploración" puede enfrentar con calma las operaciones de topografía y mapeo de diferentes escenas, sitios y tareas, escaneo de espacios interiores y subterráneos en edificios, medición de volumen, encuestas agrícolas y forestales, jardines municipales, e inspecciones de energía eléctrica. En campos como el modelado de líneas, torres y fachadas de edificios, las operaciones se pueden completar de manera rentable con alta calidad y cantidad.
La acumulación de Surestar en el campo del lidar durante más de diez años ha permitido condensar muchas capacidades técnicas en el pequeño cuerpo del "scout", de modo que ha mostrado una luz completa y deslumbrante en el campo de la topografía y la cartografía. Por "la mejor respuesta al problema del escaneo láser de la última milla".