
La era de la gama altaconducción autónomarealmente ha venido. Sin saberlo, los vehículos autónomos de nivel L3 del mercado han dado el salto de “nada a más”.
De L2 a L3, el sistema de conducción autónoma finalmente asumió la importante tarea de monitorear el entorno del vehículo desde el conductor. La importancia de la capacidad de percepción para los vehículos autónomos también se ha elevado a un nivel sin precedentes.
En el proceso de explorar capacidades de percepción más sólidas, los fabricantes de automóviles nuevos y las compañías de automóviles tradicionales han llegado gradualmente a un consenso sobre qué sensores elegir: solo mediante la fusión y la aplicación de sensores se pueden satisfacer mejor las necesidades de percepción de los vehículos autónomos de alta gama.
Perciba la "alineación principal" de la conducción autónoma
Recientemente, BMW Group anunció que brindará a los consumidores servicios de actualización de la capacidad de conducción autónoma L3 en forma de un "paquete de actualización opcional" en su sedán de la serie 7. Incluso después de que las nuevas fuerzas de la fabricación de automóviles lanzaran vehículos autónomos L3, las empresas de automóviles tradicionales también han comenzado a dar grandes pasos en la evolución de la conducción autónoma.
Mirando los modelos de conducción autónoma L3 que se han vendido o anunciado en el mercado, no es difícil encontrar que las compañías de automóviles actuales son muy consistentes en la configuración del sensor del sistema de percepción del vehículo autónomo. cámaras,LIDAR, los radares de ondas milimétricas y los radares ultrasónicos se han convertido en "las únicas cuatro mejores opciones" reconocidas por las compañías automotrices.
Entonces, para los vehículos autónomos, ¿cuáles son las funciones de estos cuatro tipos de sensores y cuáles son sus ventajas y desventajas? Deja que Xiaohui te lo explique uno por uno.
Cámara
Entre los cuatro tipos de sensores principales, la cámara tiene la tecnología más madura, una gama relativamente amplia de aplicaciones y un costo relativamente bajo. Al mismo tiempo, tiene ventajas significativas en términos de resolución, uno de los parámetros centrales en el rendimiento perceptivo. En la actualidad, la resolución de la cámara montada en el automóvil autónomo que adopta la solución de percepción visual puede alcanzar los 1280x960 píxeles en general. Es equivalente a monitorear y percibir el entorno circundante de la carrocería del vehículo en forma de "transmisión en vivo de alta definición".
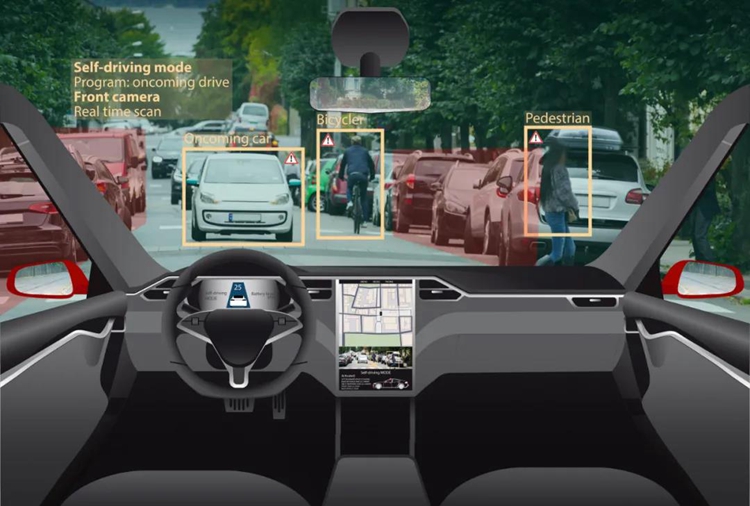
Con el apoyo del algoritmo, la cámara también puede realizar la clasificación de objetos en el área de estudio durante el proceso de detección.
A pesar de tantas ventajas, la cámara no puede "tomar la delantera" en el sistema de percepción de conducción autónoma. Esto no solo se debe a su campo de visión limitado, sino que solo puede enfocarse en un campo de visión limitado. También se debe a que los datos o la imagen que obtiene son bidimensionales, sin información del valor de profundidad, y no pueden reflejar con precisión la distancia relativa de los diferentes objetos dentro del rango de detección. La cámara requiere compatibilidad con algoritmos complejos y otros tipos de aplicaciones de fusión de sensores.
LIDAR
Lidar tiene ventajas sobresalientes, como alta precisión, largo alcance, buen rendimiento en tiempo real y una rica recopilación de información. Tome el estado sólido de ultra alta resolución a nivel de imagenlidar C-Ventiladores-256desarrollado por Surestar como ejemplo, este LiDAR puede capturar y percibir con precisión personas, automóviles y objetos a una distancia de 200 m, y tiene capacidades de captura dinámica de baja latencia y reconocimiento fino de escala de grises.
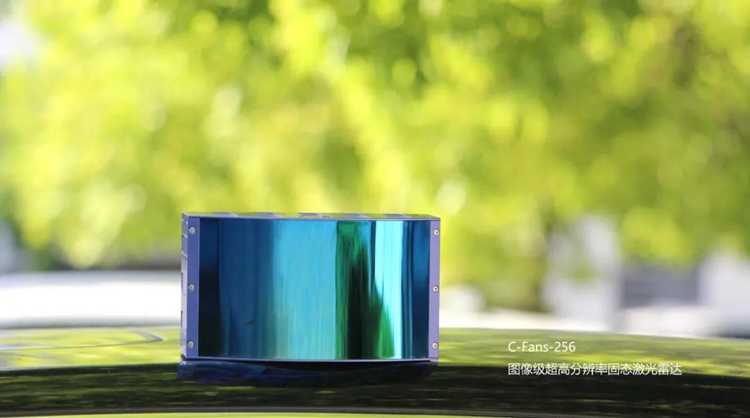
C-Ventiladores-256
Desde un punto de vista técnico, lidar puede incluso llamarse el "sensor de conducción autónomo perfecto". Sin embargo, una gran cantidad de componentes optoelectrónicos de precisión están integrados en el lidar y el nivel tecnológico es muy alto. La escasez actual de productos en el mercado que cumplen con los estándares de las regulaciones automotrices ha afectado el entusiasmo de las compañías automotrices por usar productos lidar hasta cierto punto.
Radar de onda milimétrica
El radar de ondas milimétricas también es una clase de sensores ambientales con tecnología relativamente madura, y sus ventajas de rendimiento se concentran en las dos dimensiones de medición de velocidad y alcance y robustez.

Estructura interna del radar de ondas milimétricas.
Sin embargo, debido a que la onda milimétrica se ve significativamente afectada por la atenuación y absorción de la atmósfera, no puede realizar un modelado preciso y continuo de obstáculos en el proceso dinámico de conducción de vehículos. Como resultado, el radar de ondas milimétricas solo puede resolver el problema de "ver", pero no el problema de "ver claramente" para el sistema automático de percepción de conducción.
Radar ultrasónico
El radar ultrasónico utiliza ondas ultrasónicas como medio de detección y calcula la posición relativa y la distancia entre el vehículo y los objetos en el área de medición calculando la diferencia de tiempo entre el envío y la recepción de ondas ultrasónicas, la precisión de detección es extremadamente alta.
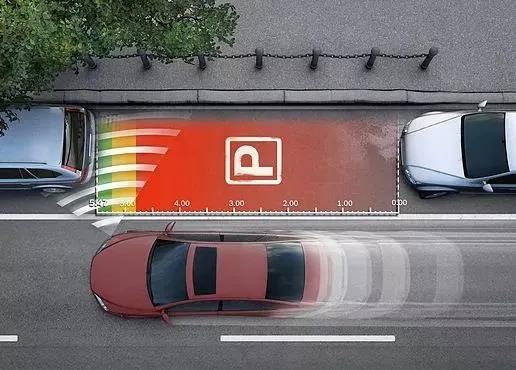
Principales escenarios de aplicación del radar ultrasónico: estacionamiento automático
Sin embargo, el rango de detección efectivo del radar ultrasónico es muy corto y la transmisión y recepción de ondas ultrasónicas son más susceptibles a las condiciones climáticas que las ondas milimétricas. En entornos de alta velocidad, el error de rango ultrasónico también aumentará debido a la baja velocidad del medio de detección. Esto hace que sus escenarios de aplicación se limiten a escenarios de baja velocidad.
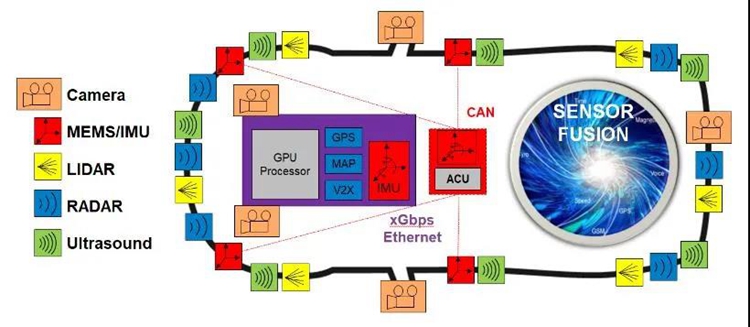
¿Cuál es la mejor solución para la fusión de sensores?
Cuatro sensores convencionales con características distintivas y sus respectivos puntos fuertes forman la "alineación principal" del sistema de percepción de conducción autónoma. Sin embargo, para lograr una conducción autónoma de alto nivel, no basta con confiar en el simple apilamiento y yuxtaposición de diferentes sensores. A través de un esquema de fusión de sensores claro, orgánico y unificado, se estimula la "reacción química" entre los sensores centrales para lograr un mejor rendimiento. El rendimiento de percepción del vehículo autónomo y el sensor auxiliar para complementar la capacidad general del sistema son necesarios para crear un sistema de percepción de vehículos autónomos.
La cámara es rentable y la tecnología está madura. Ya sea desde una perspectiva de costos o de producción, las compañías automotrices no tienen motivos para abandonarlo en el proceso de construcción de vehículos autónomos. El radar ultrasónico, debido a su medio de detección débil y robusto y a su rango de detección muy limitado, está destinado a ser incapaz de convertirse en el núcleo del sistema de detección.
De esta forma, “lidar + cámara” y “radar de ondas milimétricas + cámara” son actualmente las dos soluciones de fusión de sensores más reconocidas en la industria.
El radar de ondas milimétricas puede compensar eficazmente el problema de que los datos originales recopilados por la cámara no tienen información de valor de profundidad, que es la razón fundamental por la que algunas empresas de automóviles eligen esta solución. Sin embargo, la resolución del objetivo del radar de ondas milimétricas es muy baja y el tamaño y el contorno del objetivo ni siquiera se pueden determinar en algunas escenas. La fusión de los dos es más como una cámara "unidireccional" de radar de ondas milimétricas, en lugar de un logro mutuo. Esto significa que la fusión de nivel inferior y profunda no se puede lograr entre los dos y, con mayor frecuencia, solo se pueden usar en forma de "fusión simplificada" para resolver algunos problemas de seguimiento de trayectoria o medición de velocidad objetivo.
Aunque en los últimos años, bajo el ímpetu de la innovación y el progreso tecnológico, el radar de ondas milimétricas ha superado repetidamente el techo de rendimiento de la resolución y otro rendimiento, pero esto conlleva problemas como el alto precio de los productos de última generación y la aplicación prematura. de aplicaciones a gran escala. El "radar de ondas milimétricas + cámara" se ha convertido en "quizás se pueda ver el futuro, pero no se puede captar el presente".
Lidar es aclamado como el "ojo de la conducción autónoma" por la industria. Solo en términos de rendimiento de percepción, ocupa el primer lugar entre todos los tipos de sensores requeridos por los sistemas de conducción autónomos. Lidar emite y recibe láseres de alta frecuencia para obtener información de ubicación, lo que le permite lograr una precisión de alcance extremadamente alta y capacidades de interferencia contra el medio ambiente. En comparación con otros sensores 3D, la gama de lidar tiene ventajas obvias.
Tome la serie C-Fans de lidars de estado sólido en la línea de productos de navegación de Surestar: esta serie de productos es el primer lidar doméstico montado en el frente con un diseño completo específico para automóviles, con una resolución de 0.1°x0.1° y una gama completa de El campo de visión de escaneo de azimut puede realizar fácilmente un monitoreo de área a gran escala y de larga distancia, y proporcionar un amplio campo de visión en escenas difíciles, como giros a la izquierda sin protección, etc., para cuidar vehículos o peatones a la derecha.
La velocidad de cuadro ultra alta del nivel de la cámara deportiva le da a este lidar un poderoso campo de visión y la capacidad de capturar eventos anormales, ya sea detectando obstáculos o sondas fantasma, incorporándose a la carretera principal a alta velocidad, eventos repentinos a alta velocidad Escenas difíciles de frenado y conducción automática Tiene un buen rendimiento debajo, que es más adecuado para un entorno de conducción real complejo, dinámico y de alta velocidad.
Aunque LIDAR es ligeramente inadecuado en la realización de la percepción debido a factores como el ángulo de lanzamiento de los láseres de alta frecuencia, por ejemplo, cuando LIDAR detecta objetos distantes, la información del punto de posición obtenida suele ser escasa. La diferencia en la reflectividad de los láseres de alta frecuencia El material para distinguir los obstáculos es ligeramente insuficiente en el complejo entorno de conducción real. Sin embargo, la integración con la cámara es una forma de complementar estas deficiencias y llevar la percepción general del sistema a un nivel superior.
Bajo la premisa de completar la calibración y sincronización del lidar y la cámara, la nube de puntos del lidar se puede calibrar y proyectar en el plano de la imagen de la cámara para formar un mapa de profundidad relativamente escaso pero muy preciso. Combinado con los resultados del procesamiento del algoritmo de imagen, el sistema de percepción de conducción autónoma puede obtener datos de información de profundidad precisos y densos casi sin puntos ciegos, suavizar la influencia de la nube de puntos locales ligeramente dispersa al detectar objetivos de larga distancia y también puede pasar la altura de la cámara. La resolución de la imagen de la vida real mejora la capacidad de distinguir diferentes obstáculos con posiciones similares del mismo material. De esta forma, la distancia relativa, el perfil de posición y la velocidad de movimiento de los obstáculos pueden captarse con precisión dentro de un amplio rango de detección, y la robustez de todo el sistema de detección mejora significativamente.

Al mismo tiempo, los fabricantes de LiDAR nacionales y extranjeros, como Surestar, han logrado grandes avances en los arneses de cableado, la miniaturización, el cumplimiento de los vehículos y el control de costos de los productos LiDAR en los últimos años. Completó y fortaleció los eslabones débiles en el sistema de capacidad general de los productos lidar uno por uno, deje que la solución de fusión de sensores "lidar + cámara" pueda satisfacer las necesidades de las empresas de automóviles y los propietarios de automóviles para los sistemas de percepción de conducción autónoma en esta etapa y en el futuro. Lograr "basarse firmemente en el presente y agarrar firmemente el futuro" también hace que el trono del sensor central esencial del sistema de percepción del piloto automático lidar sea más estable y a largo plazo.(www.isurestar.net)