
Werden tragbare Geräte beim Streben nach „kleiner“ Kompromisse bei der Leistung eingehen?
Die Antwort von Surestar lautet: "Überhaupt nicht!"
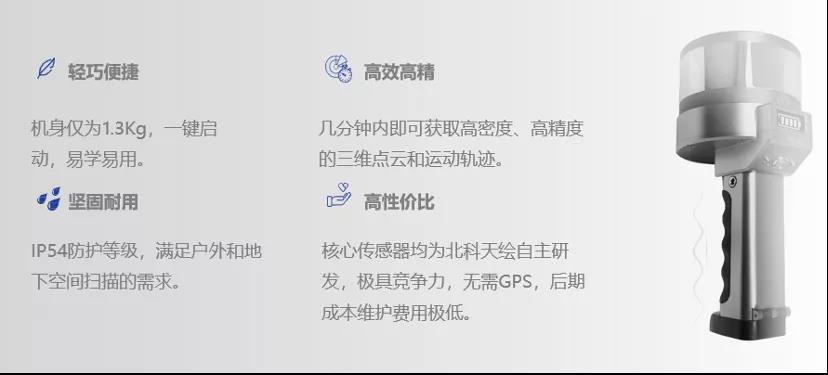
In diesem Frühjahr veröffentlichte Surestar die erste Eigenentwicklungtragbares 3D-LiDAR- „StarScan“, der nicht nur sehr kompakt ist und weniger als 1,3 kg wiegt, sondern auch über eine tiefe „innere Kraft“ verfügt.
Der neue hochpräzise SLAM-Algorithmus, der vom Scout verwendet wird, ermöglicht es, Vermessungs- und Kartierungsaufgaben effizient und mit hoher Qualität in einer Vielzahl von Szenarien durchzuführen, die als das „Polaroid“ der Vermessungs- und Kartierungsbranche bezeichnet werden können.
Lassen Sie Xiaohui heute jeden in das „mächtigste Gehirn“ des kleinen „Scout“-SLAM-Algorithmus entführen und sehen Sie, wie es mit 3D-Messung spielen kann!
SLAM (Simultaneous Localization And Mapping) bedeutet synchrones Positionieren und Mapping. Es scheint ein besonders professionelles und schwieriges technisches Konzept zu sein, aber tatsächlich ist es nicht kompliziert, SLAM zu verstehen.
Beispielsweise lässt sich der Prozess des ersten Besuchs eines Parks oder einer Ausstellung grob in die folgenden fünf Schritte unterteilen:
1. Sehen und merken Sie sich die Markierungen in Ihrer Umgebung;
2. Basierend auf den Informationen, die mit den Augen gesehen werden, verwenden Sie die Position der Markierung in Ihrem Kopf, um eine "Karte" zu erstellen;
3. Wenn sich die eigene Position ändert, ständig neue Orientierungspunkte sehen und sich daran erinnern, den Umfang der "Karte" erweitern und gleichzeitig die Details ändern;
4. Bestimmen Sie Ihre aktuelle Position im Park oder in der Ausstellungshalle gemäß der "Karte", die den Umfang erweitert und die Details in Ihrem Gehirn korrigiert;
5. Nachdem Sie eine Weile gegangen sind, können Sie durch Vergleichen der "Karte" in Ihrem Kopf mit den Dingen in Ihrer Vision im Moment bestätigen, ob Sie an diesem Ort schon einmal waren und ob Sie den gleichen Weg gegangen sind.
Das Prinzip von SLAM ist dem oben beschriebenen Prozess eigentlich sehr ähnlich, außer dass es von Maschinen und Geräten und nicht von „lebenden Menschen“ vervollständigt wird. SLAM umfasst normalerweise die folgenden Teile: Merkmalsextraktion, Datenzuordnung, Zustandsschätzung, Zustandsaktualisierung und Funktionsaktualisierung. Laienhaft ausgedrückt: "Öffnen Sie die Karte beim Gehen", ähnlich wie wir Echtzeit-Strategiespiele spielen.

Wie bei RTS-Spielen, wo die Person / das Gerät hingeht, geht die "Ansicht".
Aus Sicht praktischer Anwendungsszenarien ist der Kehrroboter die typischste und relativ einfache SLAM-Anwendung, die unserem täglichen Leben am nächsten kommt. Der Kehrroboter plant mithilfe der SLAM-Technologie automatisch die Reinigungsroute und „beherrscht“ so die „Panoramakarte“ des Raumbodens.
Gerade wegen seines brandneuen hochpräzisen SLAM-Algorithmus kann der von Surestar unabhängig entwickelte „StarScan“ Operationen während der Bewegung effizient abschließen. Vermessungs- und Kartierungsscangeräte wie Lidar, die mit SLAM-Algorithmen ausgestattet sind, können als „Polaroid“ der Vermessungs- und Kartierungsbranche bezeichnet werden.
Die Befriedigung des Anspruchs an effizientes Arbeiten unterwegs ist nur die erste Leistungsstufe der Stärke „Scouting“. Durch den SLAM-Algorithmus kann „Scouting“ Vermessungs- und Kartierungsvorgänge in komplexen Bereichen wie unterirdisch, in Innenräumen, Tunneln usw. abschließen, hochpräzise Punktwolkendaten mit hoher Dichte erhalten und eine perfekte Schließung erreichen.
Denn die vom SLAM-Algorithmus konstruierte Karte ist eine „vollständige Karte“, das heißt, jede Ecke des Arbeitsbereichs kann unabhängig von ihrer Größe ohne Hindernisse wahrgenommen werden. Ob enge, verschlungene oder komplexe räumliche Strukturumgebung, durch „Scouting“ kann eine lückenlose, genaue Wahrnehmung im OP-Bereich erreicht werden, „keine Spur mehr loslassen“.
"Star Scout" Tiefgaragen-Punktewolke - komplett und detailliert
Dank des SLAM-Algorithmus muss sich das „Scouting“ während des Betriebs nicht vollständig auf die Satellitenpositionierung verlassen. Beim Scannen geschlossener Bereiche kann durch "Scouting" auch ohne GPS-Signal ein genauer Punktwolkenabgleich erreicht werden.
Genau wie wenn Menschen ihren eigenen Standort bestimmen, werden die meisten Menschen die Karten-App nicht öffnen, um den Standort zu sehen. In einem festen Bereich, ob es sich um ein menschliches Gehirn oder den SLAM-Algorithmus eines Scouts handelt, kann es sich auf das "Gedächtnis" verlassen, um seinen Standort zu bestätigen, ohne jederzeit die Hilfe der Satellitenpositionierung in Anspruch nehmen zu müssen.
„StarScan“ hat einen dreidimensionalen Kernbereich von 200 m, ein Scan-Sichtfeld von 360°x30° und eine Impulsfrequenz von 320.000 Punkten pro Sekunde. Ein 5000 m² großer Arbeitsbereich, von der Datenerfassung bis zur Datenverarbeitung, dauert nur 10 Minuten, um die Arbeit abzuschließen.
Im Design- und Entwicklungsprozess von „StarScan“,Surestar führte umfangreiche Datenerfassungsexperimente durch, um den Fehlermodellalgorithmus kontinuierlich zu optimieren. Endlich dasHandheld-Hochpräzisions-LiDARerreichte absolute Datengenauigkeit im Zentimeterbereich.
In Verbindung mit seiner Punktwolkendicke von weniger als 5 cm unterstützt es gemeinsam das "Scouting", um hochpräzise, hochdichte dreidimensionale Punktwolken- und Bewegungstrajektorien-Messfunktionen zu erhalten, sodass alle Details im Zielbereich der Operation erfasst werden sind detailliert.
"Star Scout"-Punktwolkendetails alter Gebäude wie Traufen und Säulen können genau reproduziert werden
Zusätzlich zu den hervorragenden grundlegenden Vermessungs- und Kartierungsparametern integriert der kleine Körper des Scouts auch viele Technologien, die die Vermessungs- und Kartierungsleistung verbessern können. Beispielsweise ermöglicht das Trägheitsnavigationssystem mit 9 Freiheitsgraden Scouts eine präzise Messung und einen freien Betrieb, selbst wenn der Boden wellig ist, die Arbeitsposition oder das Ziel einen Neigungswinkel aufweist.
Darüber hinaus verwendet der „StarScan“ auch eine Neigungskompensationstechnologie, unterstützt die automatische Korrektur von ±10° in der Horizontalen und kann Daten aus mehreren Winkeln und allen Richtungen erfassen. Beim Scannen von Strommasten, Türmen und Hochhausfassaden kann das Vermessungs- und Kartierungspersonal vor Ort beispielsweise "Scouting" verwenden, um auf einfache Weise vollständige 3D-Punktwolkendaten und zugehörige Informationen zu erhalten.
Mit Bäumen, die einige Meter hoch sind, und Gebäuden, die Dutzende von Metern hoch sind, können "Scouter" Punktwolken genau erhalten
"Study" unterstützt auch Operationen mit einer Bewegungsgeschwindigkeit von 2 m/s. Für Fahrzeuge und sogar Menschen mag diese Geschwindigkeit sehr langsam erscheinen, aber im Vermessungs- und Kartierungsprozess, insbesondere bei der Verwendung von Handgeräten für die Vermessung und Kartierung, können 2 m/s als „schnelle Bewegung“ bezeichnet werden.
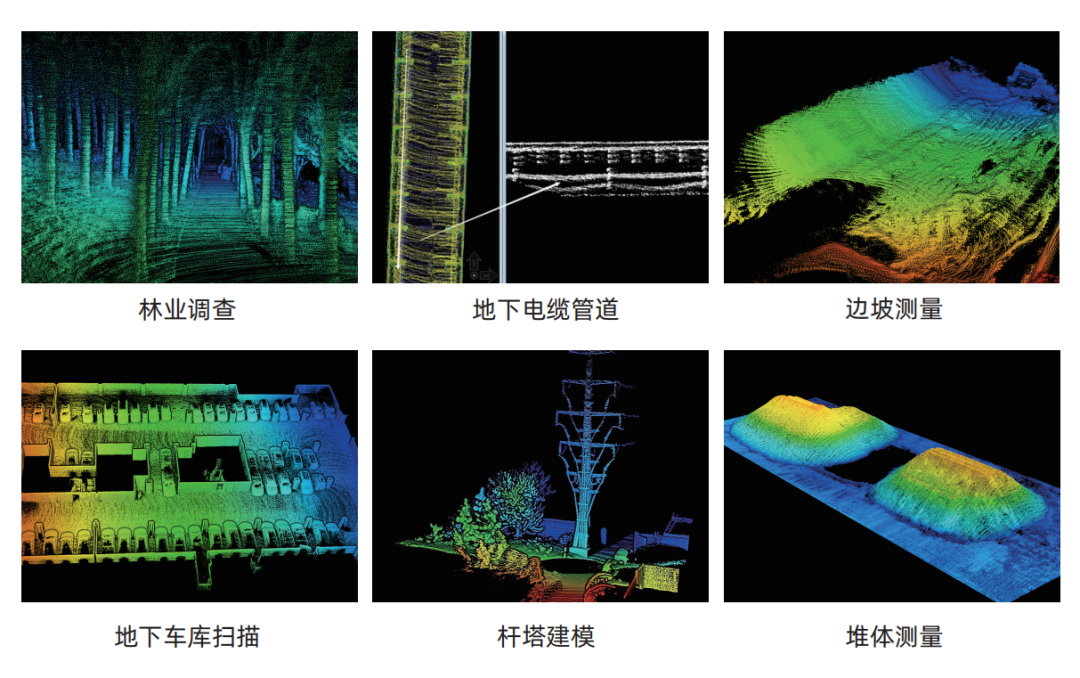
Mit dem gemeinsamen Segen des SLAM-Algorithmus und vieler Technologien kann "Scouting" den Vermessungs- und Kartierungsvorgängen verschiedener Szenen, Standorte und Aufgaben, dem Scannen von Innen- und unterirdischen Räumen in Gebäuden, Volumenmessungen, land- und forstwirtschaftlichen Vermessungen, Stadtgärten, und Stromprüfungen. In Bereichen wie Linien, Türme und Gebäudefassadenmodellierung können Arbeiten kostengünstig in hoher Qualität und Quantität durchgeführt werden.
Die mehr als zehnjährige Akkumulation von Surestar im Lidar-Bereich hat es ermöglicht, viele technische Fähigkeiten in dem kleinen Körper des "Scouts" zu verdichten, so dass er ein umfassendes und schillerndes Licht im Bereich der Vermessung und Kartierung gezeigt hat. Für „die beste Antwort auf das Problem des Laserscannings auf der letzten Meile“.