
Demonstração genial de construção em Nanning, Guangxi
1. Situação geral na área de teste
Área de teste localizada em Nanjing, Guangxi e a principal tarefa é a construção de levantamento no parque. Usamos o Genius 16P montado no DJI M300 para concluir a tarefa de pesquisa em toda a área.
 Figura 1 Situação geral em tesr area
Figura 1 Situação geral em tesr area
2. Introdução do dispositivo
Genius uav Lidar é um sistema micro Lidar desenvolvido pela Surestar de forma independente e montado principalmente em UAV multirotor. Sistema Genius integrado com R-fans multi-feixe Lidar (desenvolvido pela Surestar independentemente), MEMS IMU de alta precisão da Applanix e sistema de câmera. Todo o sistema pesa 1,056 KG (sem câmera)/1,7 KG (câmera incluída), cooperar com a estação estática terrestre para resolver a tecnologia de diferença de pós-processamento PPK e obter trajetória de alta precisão com coordenadas absolutas.

Principais características:
1) Integração altamente modular
O sistema Genius uav Lidar é um produto integrado no sistema modular de integração de sistemas da Surestar. Possui um alto grau de integração, enquanto cada módulo permanece relativamente independente.
2) Configuração flexível, adequada para diferentes plataformas de voo
Sob o sistema de integração modular, tem a escolha de configuração flexível, se os dados da imagem não forem necessários, a câmera óptica pode ser desmontada diretamente para reduzir o peso do sistema e aumentar o tempo de operação do voo; Se a plataforma puder alimentar diretamente o sistema Lidar, não serão necessários módulos de bateria de alimentação.
3) Um botão para iniciar
O sistema Genius uav Lidar suporta o modo de operação de inicialização com um botão, tornando a operação de campo flexível e conveniente.
4) Software de suporte completo
O sistema Genius está equipado com software de aquisição e processamento de dados, que pode realizar uma solução completa desde a coleta até os dados de resultado. Além disso, o software de suporte do sistema é todo desenvolvido de forma independente.
1)Nuvem Piont
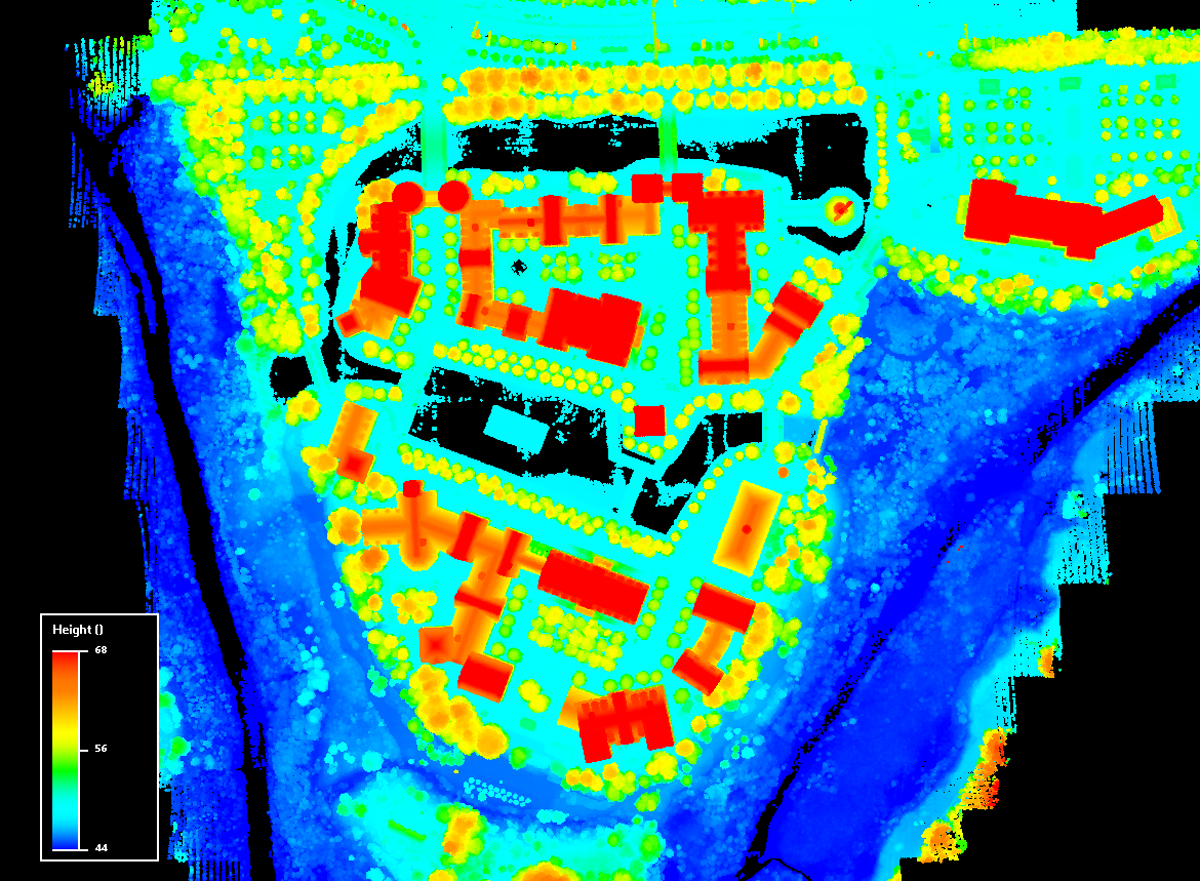
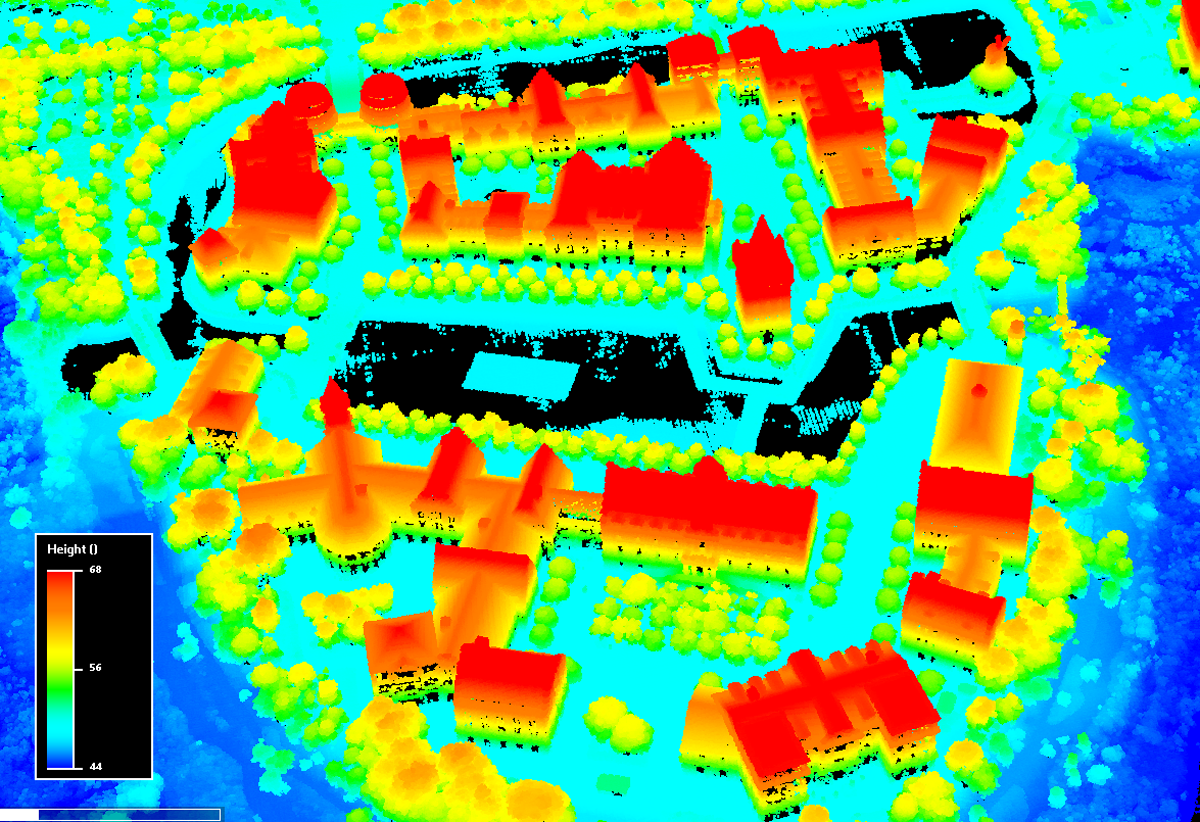 Figura 4 Efeito geral da nuvem de pontos
Figura 4 Efeito geral da nuvem de pontos
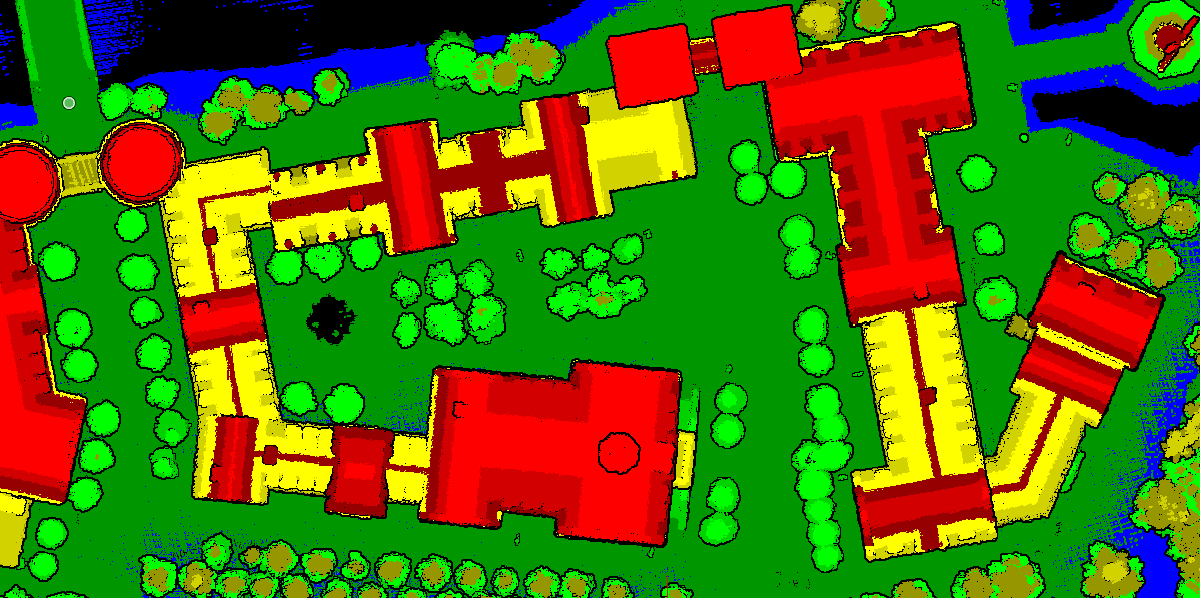 Figura 5 Efeito de elevação de nuvem de pontos
Figura 5 Efeito de elevação de nuvem de pontos
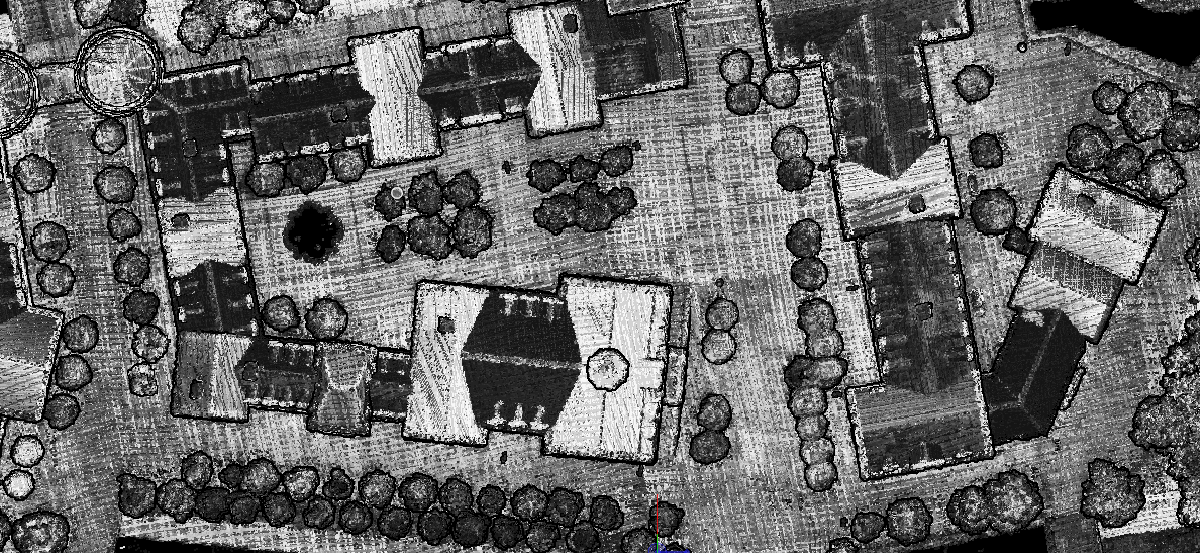 Figura 6 Efeito de nível cloudgray do ponto
Figura 6 Efeito de nível cloudgray do ponto
2) Densidade da nuvem de pontos:

Figura 7 Densidade da nuvem de pontos
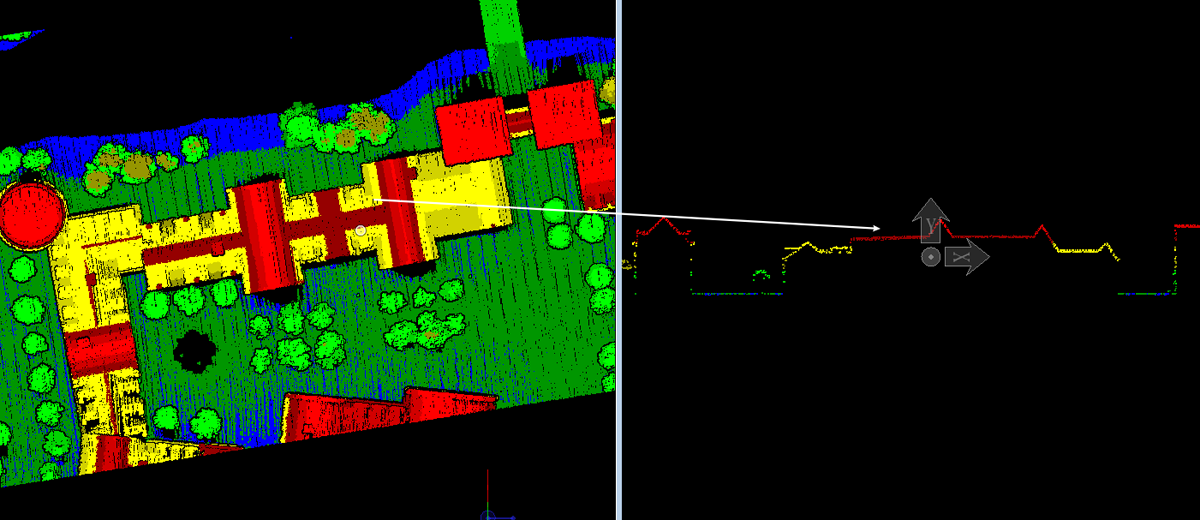 Figura 8 Perfil da nuvem de pontos da casa
Figura 8 Perfil da nuvem de pontos da casa
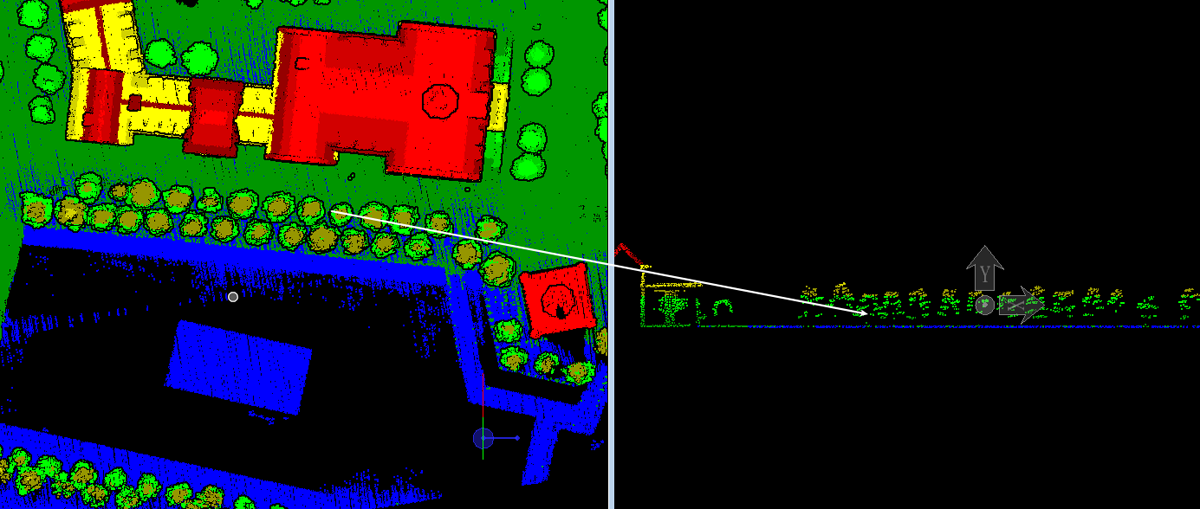 Figura 9 Perfil da nuvem de pontos de vegetação
Figura 9 Perfil da nuvem de pontos de vegetação