
Alla ricerca del "più piccolo", i dispositivi portatili scenderanno a compromessi in termini di prestazioni?
La risposta di Surestar è: "Niente affatto!"
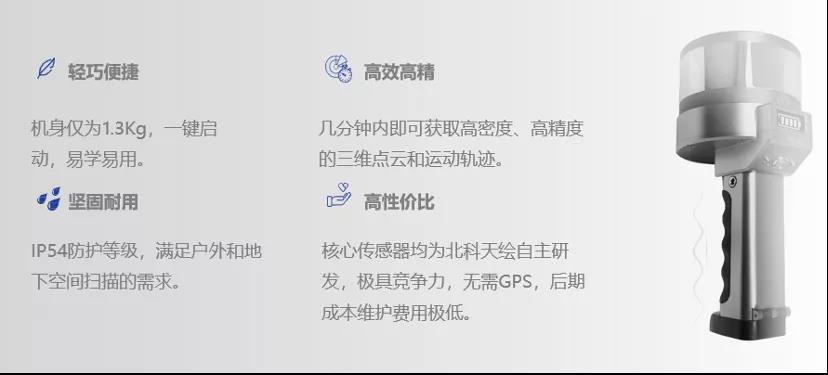
Questa primavera, Surestar ha rilasciato il primo autosviluppatoLiDAR 3D portatile-"StarScan", che non solo è molto compatto e pesa meno di 1,3 kg, ma ha anche una profonda "potenza interna".
Il nuovo algoritmo SLAM ad alta precisione utilizzato dallo scout gli consente di completare le attività di rilevamento e mappatura in modo efficiente e con alta qualità in una varietà di scenari, che possono essere definiti la "polaroid" dell'industria del rilevamento e della mappatura.
Oggi, lascia che Xiaohui porti tutti nel "cervello più potente" del piccolo algoritmo "scout"-SLAM e guarda come può giocare con la misurazione 3D!
SLAM (Simultaneous Localization And Mapping) significa posizionamento e mappatura sincroni. Sembra essere un concetto tecnico particolarmente professionale e difficile, ma in realtà non è complicato capire lo SLAM.
Ad esempio, il processo di visita di un parco o di una mostra per la prima volta può essere approssimativamente suddiviso nelle seguenti cinque fasi:
1. Vedi e ricorda i marcatori nel tuo ambiente;
2. Sulla base delle informazioni viste dagli occhi, usa la posizione dell'indicatore nella tua mente per costruire una "mappa";
3. Man mano che la propria posizione cambia, vedere e ricordare costantemente nuovi punti di riferimento, espandere l'ambito della "mappa" e modificare i dettagli allo stesso tempo;
4. Determina la tua posizione attuale nel parco o nella sala espositiva in base alla "mappa" che espande l'ambito e corregge i dettagli nel tuo cervello;
5. Dopo aver camminato per un po', confrontando la "mappa" nella tua mente con le cose nella tua visione al momento, puoi confermare se sei già stato in questo posto e se sei andato allo stesso modo.
Il principio di SLAM è in realtà molto simile al processo sopra descritto, tranne per il fatto che è completato da macchine e attrezzature, piuttosto che da "persone viventi". SLAM di solito include le seguenti parti, l'estrazione delle caratteristiche, l'associazione dei dati, la stima dello stato, l'aggiornamento dello stato e l'aggiornamento delle funzionalità. In parole povere, "apri la mappa mentre cammini", simile a come giochiamo ai giochi di strategia in tempo reale.

Come i giochi RTS, dove va la persona/dispositivo, va la "vista".
Dal punto di vista degli scenari applicativi pratici, il robot spazzante è l'applicazione SLAM più tipica e relativamente semplice più vicina alla nostra vita quotidiana. Il robot spazzante pianifica automaticamente il percorso di pulizia, affidandosi alla tecnologia SLAM, che gli consente di "padroneggiare" la "mappa panoramica" del pavimento della stanza.
È proprio grazie al suo nuovissimo algoritmo SLAM ad alta precisione che lo "StarScan" sviluppato indipendentemente da Surestar può completare in modo efficiente le operazioni durante il movimento. Le apparecchiature di scansione topografica e cartografica come il lidar dotato di algoritmi SLAM possono essere definite la "polaroid" dell'industria topografica e cartografica.
Soddisfare la domanda di operatività efficiente in mobilità è solo il primo livello di performance della forza “scouting”. Attraverso l'algoritmo SLAM, lo "scouting" può completare operazioni di rilievo e mappatura in aree complesse come sotterranei, interni, tunnel, ecc., ottenere dati di nuvole di punti ad alta precisione e ad alta densità e ottenere una perfetta chiusura.
Questo perché la mappa costruita dall'algoritmo SLAM è una "mappa completa", ovvero ogni angolo dell'area di lavoro può essere percepito senza ostacoli, indipendentemente dalle dimensioni. Che si tratti di un ambiente con struttura spaziale stretta, tortuosa o complessa, lo "scouting" può raggiungere una gamma completa di percezioni accurate nell'area operativa, "non lasciare andare alcun indizio".
Nuvola di punti del garage sotterraneo "Star Scout" completa e dettagliata
Grazie all'algoritmo SLAM, lo "scouting" non deve affidarsi interamente al posizionamento satellitare durante le operazioni. Nel processo di scansione di un'area chiusa, anche in assenza di segnale GPS, lo "scouting" può facilmente ottenere un'accurata corrispondenza della nuvola di punti.
Proprio come quando le persone determinano la propria posizione, la maggior parte delle persone non aprirà l'app della mappa per vedere la posizione. In un'area fissa, che si tratti di un cervello umano o dell'algoritmo SLAM di uno scout, può fare affidamento sulla "memoria" per confermare la sua posizione, senza la necessità di cercare l'aiuto del posizionamento satellitare in ogni momento.
"StarScan" ha una portata tridimensionale centrale di 200 m, un campo visivo di scansione di 360°x30° e una frequenza di impulso di 320.000 punti al secondo. Un'area di lavoro di 5000 m², dalla raccolta dei dati all'elaborazione dei dati, richiede solo 10 minuti per completare il lavoro.
Nel processo di progettazione e sviluppo di "StarScan",Surestar ha condotto enormi esperimenti di raccolta dati per ottimizzare continuamente l'algoritmo del modello di errore. Infine, questoLiDAR portatile ad alta precisioneha raggiunto una precisione assoluta dei dati al centimetro.
Accoppiato con il suo spessore della nuvola di punti inferiore a 5 cm, supporta congiuntamente lo "scouting" per ottenere capacità di misurazione della nuvola di punti tridimensionali ad alta precisione e ad alta densità e della traiettoria del movimento, in modo che tutti i dettagli nell'area target dell'operazione sono dettagliate.
I dettagli della nuvola di punti dell'antico edificio "Star Scout" come cornicioni e pilastri possono essere riprodotti accuratamente
Oltre agli eccellenti parametri di rilevamento e mappatura di base, il piccolo corpo dello scout integra anche molte tecnologie che possono migliorare le prestazioni di rilevamento e mappatura. Ad esempio, il sistema di navigazione inerziale a 9 gradi di libertà consente agli scout di ottenere misurazioni precise e operazioni libere anche quando il terreno è ondulato, la posizione di lavoro o il bersaglio ha un angolo di inclinazione.
Inoltre, lo "StarScan" utilizza anche la tecnologia di compensazione dell'inclinazione, supporta la correzione automatica dell'orizzontale ±10° e può raccogliere dati da più angolazioni e tutte le direzioni. Ad esempio, durante la scansione di pali della corrente, torri e facciate di grattacieli, il personale addetto al rilevamento e alla mappatura a terra può utilizzare lo "scouting" per ottenere facilmente i dati completi della nuvola di punti 3D e le informazioni correlate.
Con alberi alti pochi metri ed edifici alti decine di metri, gli "scouter" possono ottenere con precisione le nuvole di punti
"Studio" supporta anche le operazioni a una velocità di movimento di 2 m/s. Per i veicoli e persino per gli esseri umani, questa velocità può sembrare molto lenta, ma nel processo di rilevamento e mappatura, specialmente quando si utilizzano dispositivi portatili per il rilevamento e la mappatura, 2 m/s possono essere definiti "movimento veloce".
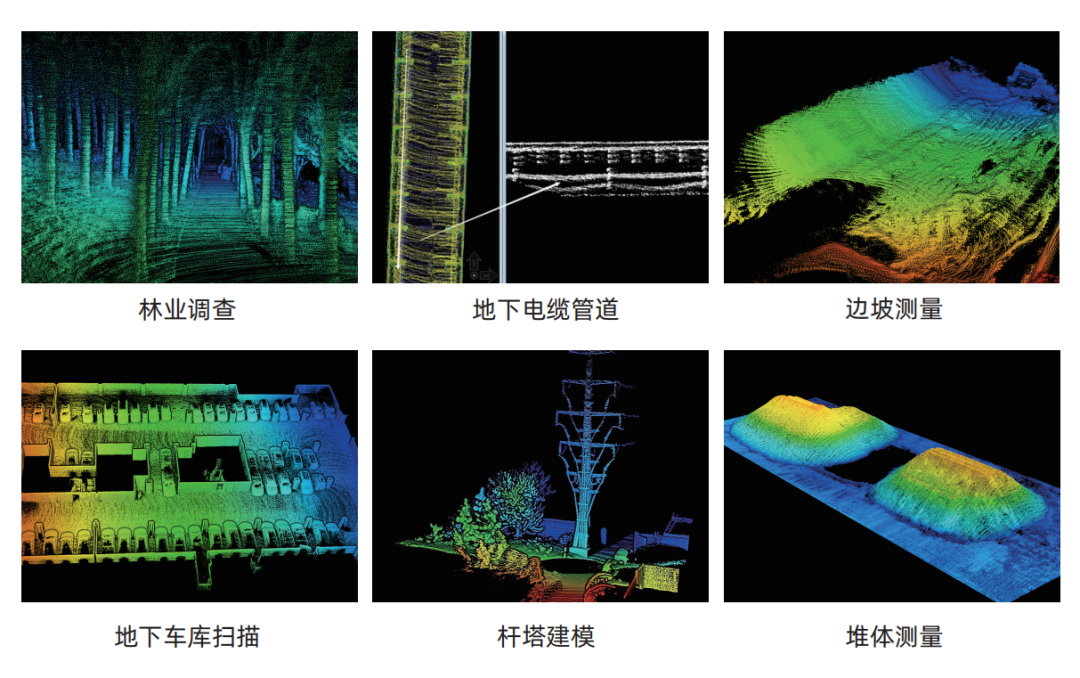
Con la benedizione congiunta dell'algoritmo SLAM e di molte tecnologie, lo "scouting" può affrontare con calma le operazioni di rilevamento e mappatura di diverse scene, siti e compiti, scansione di spazi interni e sotterranei negli edifici, misurazione del volume, rilievi agrari e forestali, giardini comunali, e ispezioni di energia elettrica. In campi come linee, torri e modellazione di facciate di edifici, le operazioni possono essere completate in modo conveniente con alta qualità e quantità.
L'accumulo di Surestar nel campo del lidar per più di dieci anni ha permesso di condensare molte capacità tecniche nel piccolo corpo dello "scout", tanto da mostrare una luce completa e abbagliante nel campo del rilevamento e della mappatura. Per "la migliore risposta al problema della scansione laser dell'ultimo miglio".