
„Ergebnisorientiert, faktensprechend“ ist das einzige Gesetz des unternehmerischen Überlebens.
Seit Surestar sein Geschäft mit intelligenten vernetzten Autos gestartet hat, hat es sich zum Kernziel gesetzt, Festkörper zu entwickelnLidardie vorinstalliert und in Serie produziert werden können. Egal wie heiß der mechanische Typ mit hoher Linienzahl war, wie heiß das OPA-Konzept war und wie der Faserlaser als gleichwertig mit Hunderten von Linien beworben wird, Surestar wird nicht bewegt.
Surestar besteht darauf, dass mechanisches Laserradar nicht für die Massenproduktion geeignet ist, OPA das Labor nicht verlassen kann und Faserlaser am besten für die Vermessung und Kartierung von Laserradar geeignet sind. Nicht dem Trend oder den Vorlieben der Hauptstadt folgend, praktizierte Surestar allein im Bereich derLidar.
Surestar kombiniert die Anforderungen von Fahrzeugvorschriften, Kosten und Szenarien und stützt sich auf 21 Jahre Akkumulation im Lidar-Bereich. Surestar hat viele Probleme in den Bereichen optische und mechanische Struktur, Laser-Transceiver, Signalverarbeitung, Herstellungsprozess, Chip, Licht und Klein überwunden Größe usw. , Erstellt ein kostengünstiges 256-Zeilen-Solid-State-Lidar für die Frontmontage auf der Grundlage der Halbleitertechnologie.
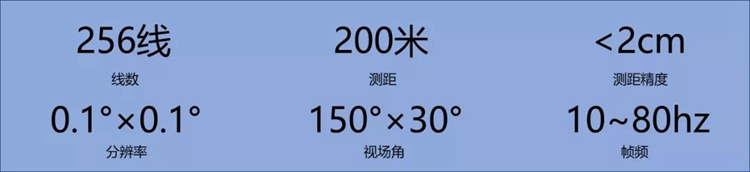
C-Fans256 Hauptparameter
Wie C-Fans256 die Wahrnehmung verbessert
Unbemannte Fahrzeuge werden während der Fahrt auf eine Vielzahl komplexer Straßenbedingungen stoßen: Fahrzeuge, die die Straße illegal besetzen, Staus in geringer Entfernung, Fahrzeuge, die gegen die Verkehrsregeln fahren, rückläufige Elektrofahrzeuge, Geistersonden, ungeschütztes Linksabbiegen, Fahrräder, die die Straße überqueren, Leitkegel oder Warnschilder für temporäre Bauten, Tunnel, Keller, Autobahnen usw.
Verschiedene Gebiete haben unterschiedliche Straßeneigenschaften. Südliche Städte sind regnerisch und die Straßen sind anfällig für Feuchtigkeit, und es gibt mehr Motorräder, die sich nicht an die Verkehrsregeln halten. Pekings innere Ringstraße hat breite Straßen, dichte Fahrzeuge und höhere Geschwindigkeiten.
Das reichhaltige und stabile Wahrnehmungsmodul ist die Avantgarde des unbemannten Fahrsystems. Es bietet Dateneingabe für die Feinentscheidung und Planung. C-Fans256 hat zu Beginn des Designs eingehende Untersuchungen zu verschiedenen Szenarien durchgeführt, um bei der Lösung verschiedener Eckfälle zu helfen und die Wahrnehmungsfähigkeit des menschlichen Fahrsystems zu verbessern hat eine Reihe von Geheimwaffen geschaffen.
C-Fans256, hohe Auflösung (0,1°×0,1°)

Beim Fahren auf städtischen Autobahnen, Fußgängern, die die Verkehrsregeln in der Ferne nicht befolgen, und Fahrzeugen, die versehentlich auf der Autobahn rückwärts fahren usw., kann hochauflösendes Lidar verschiedene Probleme lösen, auf die Millimeterwellenradar und -kamera stoßen Erkennung, stabile Wahrnehmungseingabe für das Entscheidungsplanungssystem bereitstellen.
Die Echtzeitdaten von Lidar unter 100 Linien sind eine spärliche Punktwolke, aber mit ihrer ultrahohen Auflösung von 0,1°×0,1° kann die C-Fans256-Linie immer noch eine Rasterdichte von 0,4m×0,4m auf 200m erreichen. Bei einem gewöhnlichen SUV mit einer Breite von 1,8 m und einer Höhe von 1,8 m ist auf 200 m noch eine 4×4-Punktmatrix zu sehen.
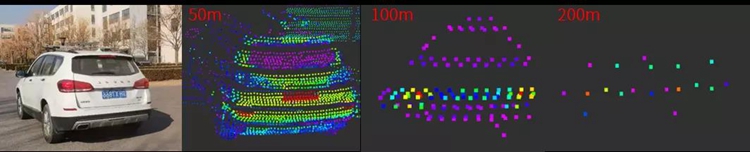
C-Fans256 Fahrzeug gemessene Punktwolke
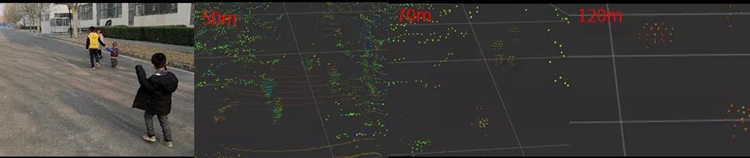
C-Fans256 gemessene Punktwolke für Kinder (Höhe <1,1m)

C-Fans256 gemessene Punktwolke von kleinen Hindernissen (20cm×20cm×20cm)
Die hohe Auflösung entspricht der hohen Rasterdichte, wodurch die Erkennung von weiter entfernten und kleineren Hindernissen realisiert werden kann. Unter den komplexen Straßenverhältnissen der Stadt können die Details der entfernten Änderungen so früh wie möglich gefunden werden. Bei hohen Geschwindigkeiten können die Aktionen oder Auffälligkeiten entfernter Fahrzeuge im Voraus erkannt werden. Eine solche Detektionsfähigkeit bedeutet höhere Sicherheit.
C-Fans256, großes Sichtfeld (150°×30°)
In der Szene des ungeschützten Linksabbiegens an Kreuzungen und komplexen Kreuzungen in städtischen Gebieten kann ein großes FOV autonome Fahrzeuge mit reichhaltigen Wahrnehmungsinformationen versorgen, insbesondere beim Vollenden von Kehrtwendungsbewegungen, je größer das Sichtfeld, desto besser, bereitgestellt von C- Fans256 Mit einem FOV von 150°×30° kann es einen großen Erfassungsbereich bieten, wenn das Fahrzeug nach links oder bei einer Kehrtwende abbiegt, und die Sicherheit des automatischen Fahrsystems verbessern.
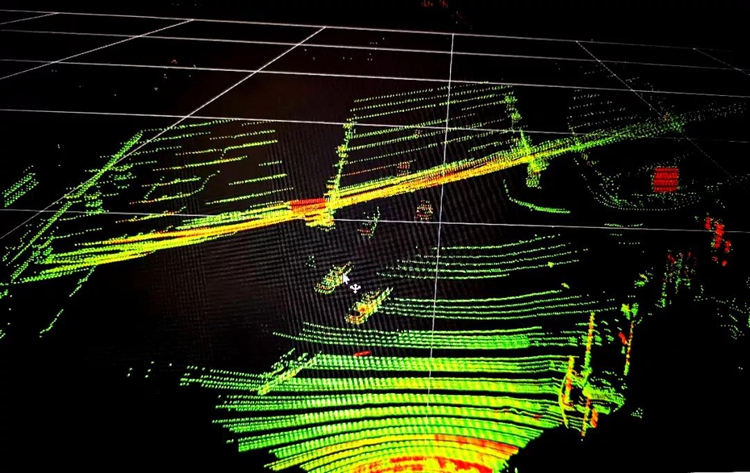
C-Fans256 Punktwolke
C-Fans256, hohe Bildrate (80Hz)
In Szenen wie Geistersonden, Hochgeschwindigkeits-Einfädeln in die Hauptstraße, plötzliches Hochgeschwindigkeitsbremsen usw. kann die präzise und schnelle Fähigkeit von Lidar zur direkten Konturmessung autonomen Fahrzeugen helfen, innerhalb von 100 Millisekunden zu reagieren. Der Schlüsselindikator zu diesem Zeitpunkt ist die Bildrate. Bei einer Geistersonde oder einem plötzlich bremsenden Auto beträgt die Relativgeschwindigkeit 80 km/h. Wenn die Radarrahmenrate 10 Hz beträgt, hat der Verfolgungsalgorithmus die Berechnung in 5 Rahmen abgeschlossen, was die Antwort des Fahrzeugs bedeutet. Der Abstand beträgt:
Vom Unfallzeitpunkt bis zum Beginn der Systembeurteilung hat sich der relative Abstand zwischen beiden um 6,7 m verkürzt und dann der Bremsweg des Fahrzeugs hinzugerechnet, was natürlich eine Erhöhung des Risikofaktors bedeutet.

Fahrzeugreaktionsabstand bei unterschiedlichen Bildraten (80 km/h)
Dies ist einer der Hauptgründe, warum die meisten autonomen Fahrzeuge derzeit in Szenarien mit niedriger bis mittlerer Geschwindigkeit und geringer Dynamik betrieben werden. Um die Wahrnehmungsfähigkeit des autonomen Fahrsystems so weit wie möglich zu verbessern, hat C-Fans256 seine Bildrate auf 80 Hz erhöht, was in der Branche unerhört ist, und hofft, zur Realisierung des unbemannten Fahrens in Hochgeschwindigkeit beizutragen. hochdynamische und komplexe Umgebungen.
80 Hz erfassen Hochgeschwindigkeitsobjekte, die in die Luft fallen (0,3-fache Wiedergabe)
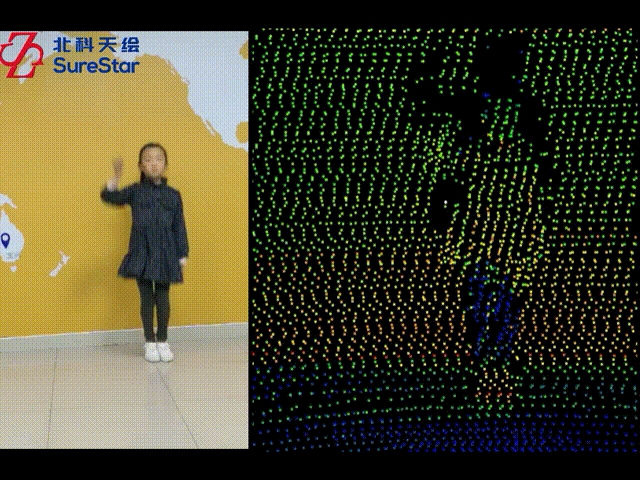
Verwenden Sie 80 Hz, um den dynamischen Tanz des kleinen Mädchens einzufangen (Tanzname: Klatsch des verlorenen Sohns).
Die hohe Bildrate von 80 Hz sorgt für eine reibungslose und schnelle dynamische Erkennung. In einer realen Verkehrsumgebung kann die dynamische Erkennungszeit von unbemannten Fahrzeugen von der Größenordnung von Hunderten von Millisekunden auf die Größenordnung von zehn Millisekunden verkürzt werden, wodurch eine höhere Sicherheit erreicht wird.
Gute Graustufenerkennung
Die L2-Szenenbibliothek muss eine Teilmenge der L3-Szenenbibliothek sein, wie z. B. LCC-Spurzentrierungsassistent, ALC-Assistent für automatischen Spurwechsel, ACC-Vollgeschwindigkeits-Adaptive-Cruise, ATC-Adaptive-Curve-Cruise, LDW-Spurverlassen usw. Die Verwendung von Lidar kann Verbesserung des automatischen Fahrens Robustheit des Systems bei Nacht, Tunnelein- und -ausfahrten usw.
Diese Szenen beruhen hauptsächlich auf der genauen Erkennung von Fahrspurlinien und Straßenrändern durch den Sensor, was Anforderungen an das Graustufen-Erkennungsniveau von Lidar stellt, das eine genaue und präzise Graustufen-Erkennung erfordert.
C-Fans256 bietet eine 8-Bit-Graustufenauflösung, die bei jedem Wetter eine klare Spurlinienerkennung realisieren und die Nachtwahrnehmungsfähigkeit des unbemannten Fahrsystems verbessern kann.

Spurlinienerkennungseffekt bei Nacht
Einhaltung der Kfz-Vorschriften, selbstentwickelte Chips, unabhängige und kontrollierbare Lieferkette
Surestar hat drei wichtige Systemzertifizierungen erhalten: IATF 16949, ISO9001 und ISO 14001. Und unter Bezugnahme auf die spezifischen Anforderungen von ISO 16750 und mehreren in- und ausländischen Automobilunternehmen wurden für uns eine Reihe von Fahrzeugkonformitätstests von Drittanbietern durchgeführt Labore. Derzeit ist die offizielle Ankündigung des C-Fans256-Vorinstallationsprojekts auf dem Weg, bitte erwarten.

Fahrzeugkonformität
Lidar ist eine Schlüsseltechnologie im Bereich der autonomen Fahrsensoren. In der aktuellen internationalen Situation sind Lidar-Hersteller, die über eine hervorragende Produktleistung, Stabilität und Zuverlässigkeit verfügen und alle Schlüsselkomponenten lokalisieren können, besonders selten. Nach 21 Jahren langfristiger Akkumulation hat Surestar viele Male die heimische Lücke im Anwendungsbereich des Laserradars gefüllt und die vollständig im Inland hergestellte unabhängige Steuerbarkeit des Messlaserradars realisiert. Der Preis des Mess-Lidars wurde von zig Millionen importierter Ausrüstung auf die 100.000-Marke gesenkt, und als Ergebnis hat es wiederholt den Sonderpreis und den ersten Preis für wissenschaftlichen und technologischen Fortschritt auf Provinz- und Ministerebene gewonnen.
Mit tiefer Akkumulation hat Surestar die Chipisierung des Kernmoduls der Laser-Radar-Signalverarbeitung realisiert. Bis jetzt hat es das unabhängige Design von 24 Chips in 5 Kategorien abgeschlossen und die vollständige unabhängige Steuerung der Kernkomponenten des Laserradars realisiert.

Hohe Ziele und Bodenständigkeit sind die Prinzipien von Surestar. Seit mehr als 20 Jahren schreitet Surestar leise auf dem Weg der Lokalisierung von Lidar voran. Diese Straße ist dünn besiedelt, mit Dornen und langen Straßen. Die Freunde von Surestar innovieren weiter, polieren Produkte, kreieren keine bewussten Themen und streben nicht nach kurzfristigen Blumen und Aufmerksamkeiten. Dies ist wahrscheinlich der wesentliche Unterschied zwischen Surestar und dem neuen Lidar-Unternehmen, das dem Wind hinterher jagt.(www.isurestar.net)