
Die High-End-Äraautonomes Fahrenist wirklich gekommen. Ohne es zu wissen, haben autonome Fahrzeuge der Stufe L3 auf dem Markt den Sprung „von nichts zu mehr“ vollzogen.
Von L2 bis L3 übernahm schließlich das autonome Fahrsystem die wichtige Aufgabe der Umgebungsüberwachung des Fahrzeugs vom Fahrer. Auch die Bedeutung der Wahrnehmungsfähigkeit für autonome Fahrzeuge wurde auf eine beispiellose Höhe gehoben.
Im Prozess der Erforschung stärkerer Wahrnehmungsfähigkeiten haben neue Automobilhersteller und traditionelle Automobilunternehmen allmählich einen Konsens darüber erzielt, welche Sensoren zu wählen sind: Nur durch Fusion und Anwendung von Sensoren können die Wahrnehmungsanforderungen von autonomen High-End-Fahrzeugen besser erfüllt werden.
Nehmen Sie die „Hauptaufstellung“ des Selbstfahrens wahr
Kürzlich gab die BMW Group bekannt, dass sie Verbrauchern L3-Upgrade-Services für die autonome Fahrfähigkeit in Form eines „optionalen Upgrade-Pakets“ für ihre 7er-Limousine anbieten wird. Auch nachdem die neuen Kräfte der Automobilherstellung autonome L3-Fahrzeuge auf den Markt gebracht haben, haben auch traditionelle Automobilhersteller begonnen, große Fortschritte bei der Entwicklung des autonomen Fahrens zu machen.
Betrachtet man die auf dem Markt verkauften oder angekündigten selbstfahrenden L3-Modelle, ist es nicht schwer festzustellen, dass die aktuellen Autohersteller in der Sensorkonfiguration des Wahrnehmungssystems für selbstfahrende Fahrzeuge sehr konsistent sind. Kameras,Lidar, Millimeterwellenradar und Ultraschallradar sind „die einzigen vier besten Wahlmöglichkeiten“ geworden, die von Autoherstellern anerkannt werden.
Welche Funktionen haben diese vier Arten von Sensoren für autonome Fahrzeuge und welche Vor- und Nachteile haben sie? Lassen Sie es sich von Xiaohui einzeln erklären.
Kamera
Unter den vier Arten von Mainstream-Sensoren hat die Kamera die ausgereifteste Technologie, ein relativ breites Anwendungsspektrum und relativ niedrige Kosten. Gleichzeitig hat es erhebliche Vorteile in Bezug auf die Auflösung, einen der Kernparameter für die Wahrnehmungsleistung. Derzeit kann die Auflösung der Kamera, die an dem selbstfahrenden Auto montiert ist, das die visuelle Wahrnehmungslösung übernimmt, im Allgemeinen 1280 x 960 Pixel erreichen. Es ist gleichbedeutend mit der Überwachung und Wahrnehmung der Umgebung der Fahrzeugkarosserie in Form einer „hochauflösenden Live-Übertragung“.
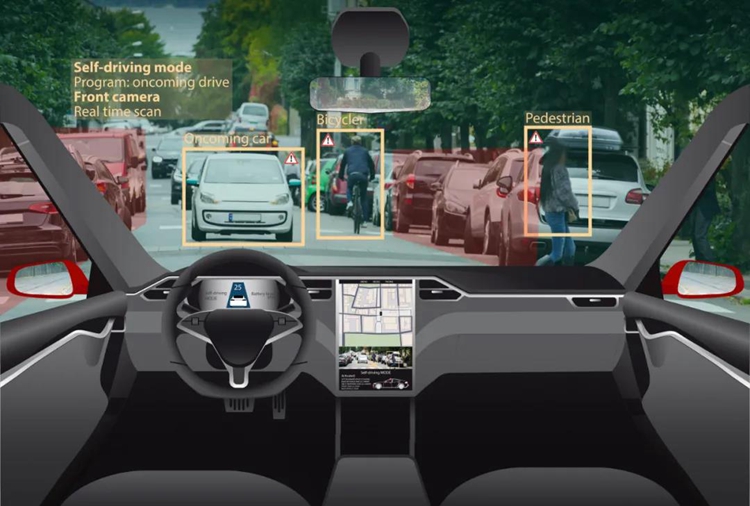
Mit Unterstützung des Algorithmus kann die Kamera während des Abtastvorgangs auch die Klassifizierung von Objekten im Erfassungsbereich realisieren
Trotz so vieler Vorteile kann die Kamera im Wahrnehmungssystem des autonomen Fahrens nicht „die Führung übernehmen“. Dies liegt nicht nur an seinem begrenzten Sichtfeld, es kann auch nur auf ein begrenztes Sichtfeld fokussieren. Dies liegt auch daran, dass die erhaltenen Daten oder Bilder zweidimensional sind, ohne Tiefenwertinformationen, und den relativen Abstand verschiedener Objekte innerhalb des Erfassungsbereichs nicht genau wiedergeben können. Die Kamera erfordert komplexe Algorithmusunterstützung und andere Arten von Sensorfusionsanwendungen.
LiDAR
Lidar hat herausragende Vorteile wie hohe Genauigkeit, große Reichweite, gute Echtzeitleistung und reichhaltige Sammlung von Informationen. Nehmen Sie den ultrahochauflösenden Festkörper auf BildebeneLidar C-Lüfter-256Dieser LiDAR, der beispielsweise von Surestar entwickelt wurde, kann Personen, Autos und Objekte in einer Entfernung von 200 m genau erfassen und wahrnehmen und verfügt über eine dynamische Erfassung mit geringer Latenz und feine Graustufenerkennungsfunktionen.
C-Fans-256
Aus technischer Sicht kann Lidar sogar als „perfekter Sensor für autonomes Fahren“ bezeichnet werden. Allerdings sind im Lidar eine Vielzahl von optoelektronischen Präzisionskomponenten integriert, und das technologische Niveau ist sehr hoch. Der derzeitige Mangel an Produkten auf dem Markt, die den Standards der Automobilvorschriften entsprechen, hat die Begeisterung der Automobilunternehmen, Lidar-Produkte zu verwenden, in gewissem Maße beeinträchtigt.
Millimeterwellenradar
Millimeterwellenradar ist auch eine Klasse von Umweltsensoren mit relativ ausgereifter Technologie, und ihre Leistungsvorteile konzentrieren sich auf die beiden Dimensionen Geschwindigkeits- und Reichweitenmessung sowie Robustheit.

Interner Aufbau eines Millimeterwellenradars
Da die Millimeterwelle jedoch erheblich durch die Dämpfung und Absorption der Atmosphäre beeinflusst wird, kann sie keine genaue und kontinuierliche Modellierung von Hindernissen im dynamischen Prozess des Fahrzeugfahrens durchführen. Im Ergebnis kann Millimeterwellenradar nur das Problem des "Sehens", nicht aber das Problem des "klaren Sehens" für das automatische Fahrwahrnehmungssystem lösen.
Ultraschallradar
Das Ultraschallradar verwendet Ultraschallwellen als Erfassungsmedium und berechnet die relative Position und den Abstand zwischen dem Fahrzeug und den Objekten im Messbereich, indem es die Zeitdifferenz zwischen dem Senden und Empfangen von Ultraschallwellen berechnet. Die Erkennungsgenauigkeit ist extrem hoch.
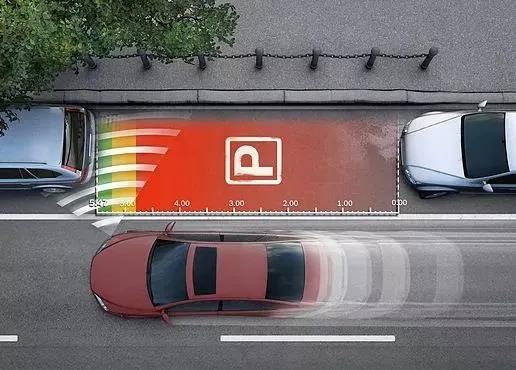
Hauptanwendungsszenarien des Ultraschallradars: Automatisches Einparken
Der effektive Erfassungsbereich des Ultraschallradars ist jedoch sehr kurz, und das Senden und Empfangen von Ultraschallwellen ist anfälliger für Wetterbedingungen als Millimeterwellen. In Hochgeschwindigkeitsumgebungen wird der Ultraschallentfernungsfehler aufgrund der niedrigen Geschwindigkeit des Detektionsmediums ebenfalls zunehmen. Dadurch sind seine Anwendungsszenarien auf Niedriggeschwindigkeitsszenarien beschränkt.
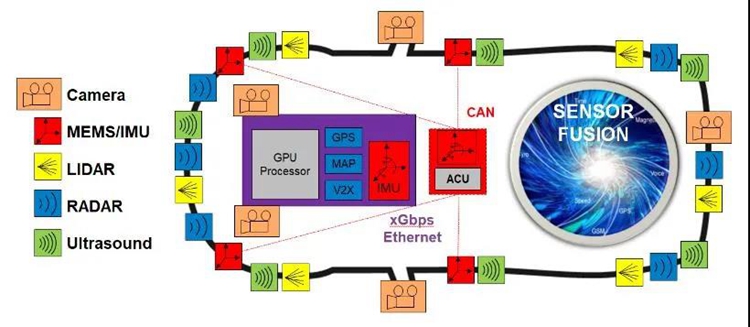
Was ist die beste Lösung für Sensorfusion?
Vier Mainstream-Sensoren mit charakteristischen Merkmalen und ihren jeweiligen Stärken bilden die „Hauptaufstellung“ des autonomen Fahrwahrnehmungssystems. Um autonomes Fahren auf hohem Niveau zu erreichen, reicht es jedoch nicht aus, sich auf das einfache Stapeln und Nebeneinanderstellen verschiedener Sensoren zu verlassen. Durch ein klares, organisches und einheitliches Sensorfusionsschema wird die "chemische Reaktion" zwischen den Kernsensoren stimuliert, um eine bessere Leistung zu erzielen. Die Wahrnehmungsleistung des selbstfahrenden Fahrzeugs und des Hilfssensors zur Ergänzung der Gesamtfähigkeit des Systems sind notwendig, um ein autonomes Fahrzeugwahrnehmungssystem zu schaffen.
Die Kamera ist kostengünstig und die Technik ausgereift. Ob aus Kosten- oder Produktionssicht, Autohersteller haben keinen Grund, beim Bau selbstfahrender Fahrzeuge darauf zu verzichten. Das Ultraschallradar ist aufgrund seines schwachen und robusten Sensormediums und seines sehr begrenzten Erfassungsbereichs dazu bestimmt, nicht zum Kern des Sensorsystems zu werden.
Auf diese Weise sind „Lidar + Kamera“ und „Millimeterwellenradar + Kamera“ derzeit die beiden anerkanntesten Sensorfusionslösungen in der Branche.
Millimeterwellenradar kann das Problem, dass die von der Kamera erfassten Originaldaten keine Tiefenwertinformationen enthalten, effektiv ausgleichen, was der Hauptgrund dafür ist, dass sich einige Automobilhersteller für diese Lösung entscheiden. Die Zielauflösung des Millimeterwellenradars ist jedoch sehr gering, und die Größe und Kontur des Ziels können in einigen Szenen nicht einmal bestimmt werden. Die Verschmelzung der beiden ähnelt eher einer Millimeterwellen-Radar-Einwegkamera als einer gegenseitigen Errungenschaft. Dies bedeutet, dass die Fusion auf unterster Ebene und in der Tiefe zwischen den beiden nicht erreicht werden kann und häufiger nur in Form einer "vereinfachten Fusion" verwendet werden kann, um einige Probleme mit der Zielgeschwindigkeitsmessung oder der Flugbahnverfolgung zu lösen.
Obwohl das Millimeterwellenradar in den letzten Jahren unter dem Anstoß technologischer Innovationen und Fortschritte immer wieder die Leistungsgrenze der Auflösung und anderer Leistung durchbrochen hat, gehen damit Probleme wie der hohe Preis von Spitzenprodukten und die verfrühte Anwendung einher von Großanwendungen. Aus dem „Millimeterwellenradar + Kamera“ ist ein „Vielleicht die Zukunft zu sehen, aber die Gegenwart nicht zu fassen“ geworden.
Lidar wird von der Industrie als „Auge des autonomen Fahrens“ gefeiert. Allein in Bezug auf die Wahrnehmungsleistung rangiert er unter allen Arten von Sensoren, die für autonome Fahrsysteme benötigt werden, an erster Stelle. Lidar sendet und empfängt Hochfrequenzlaser, um Standortinformationen zu erhalten, wodurch eine extrem hohe Entfernungsgenauigkeit und umgebungsbedingte Interferenzfähigkeiten erreicht werden können. Im Vergleich zu anderen 3D-Sensoren hat die Reichweite von Lidar offensichtliche Vorteile.
Nehmen Sie die C-Fans-Serie von Solid-State-Lidars in der Navigationsproduktlinie von Surestar: Diese Produktserie ist das erste frontmontierte Lidar für den Haushalt mit einem vollständig autospezifischen Design, mit einer Auflösung von 0,1°x0,1° und Eine vollständige Palette von Das Azimut-Scanning-Sichtfeld kann problemlos eine großflächige und weiträumige Bereichsüberwachung realisieren und ein breites Sichtfeld in schwierigen Szenen wie ungeschütztem Linksabbiegen usw. bieten, um sich um Fahrzeuge zu kümmern oder Fußgänger auf der rechten Seite.
Die ultrahohe Bildrate der Sportkameraebene verleiht diesem Lidar ein starkes Sichtfeld und die Fähigkeit, ungewöhnliche Ereignisse zu erfassen, sei es das Erkennen von Hindernissen oder Geistersonden, das Hochgeschwindigkeits-Einfädeln in die Hauptstraße oder das Hochgeschwindigkeits-Plötzchen Bremsen und automatisches Fahren in schwierigen Szenen. Es hat eine gute Leistung darunter, die besser für schnelle, dynamische und komplexe reale Fahrumgebungen geeignet ist.
Obwohl Lidar bei der Wahrnehmungsrealisierung aufgrund von Faktoren wie dem Einstrahlwinkel von Hochfrequenzlasern etwas unzureichend ist, wenn Lidar entfernte Objekte erkennt, sind die erhaltenen Positionspunktinformationen oft spärlich. Der Unterschied im Reflexionsvermögen von Hochfrequenzlasermaterial zur Unterscheidung von Hindernissen ist in der komplexen realen Fahrumgebung etwas unzureichend. Die Integration mit der Kamera ist jedoch eine Möglichkeit, diese Mängel zu ergänzen und die Gesamtwahrnehmung des Systems auf ein höheres Niveau zu bringen.
Unter der Prämisse, die Kalibrierung und Synchronisation des Lidars und der Kamera abzuschließen, kann die Punktwolke des Lidars kalibriert und auf die Bildebene der Kamera projiziert werden, um eine relativ spärliche, aber sehr genaue Tiefenkarte zu bilden. In Kombination mit den Ergebnissen der Bildalgorithmusverarbeitung kann das autonome Fahrwahrnehmungssystem genaue und dichte Tiefeninformationsdaten fast ohne tote Winkel erhalten, den Einfluss der etwas spärlichen lokalen Punktwolke bei der Erkennung von Fernzielen glätten und auch passieren die Höhe der Kamera. Das hochauflösende reale Bild verbessert die Fähigkeit, verschiedene Hindernisse mit ähnlichen Positionen aus demselben Material zu unterscheiden. Auf diese Weise können der relative Abstand, das Positionsprofil und die Bewegungsgeschwindigkeit von Hindernissen innerhalb eines großen Erfassungsbereichs genau erfasst werden, und die Robustheit des gesamten Erfassungssystems wird erheblich verbessert.

Gleichzeitig haben in- und ausländische LiDAR-Hersteller wie Surestar in den letzten Jahren große Fortschritte bei LiDAR-Produktkabelbäumen, Miniaturisierung, Fahrzeugkonformität und Kostenkontrolle gemacht. Durch die schrittweise Vervollständigung und Stärkung der schwachen Glieder im Gesamtfähigkeitssystem der Lidar-Produkte kann die Sensorfusionslösung „Lidar+Kamera“ die Anforderungen von Automobilunternehmen und Fahrzeugbesitzern für autonome Fahrwahrnehmungssysteme in dieser Phase und in Zukunft erfüllen die Zukunft. Das Erreichen von "fest auf der Gegenwart basierend und fest in die Zukunft greifend" macht auch den Thron des Kernsensors des Lidar-Autopilot-Wahrnehmungssystems stabiler und langfristiger.(www.isurestar.net)